
Configuraciones del límite de espacio
Para establecer los límites de espacio del robot, toque el botón 
- Introduzca el nombre de la celda de trabajo en el campo Nombre de celda de trabajo, en la parte superior de la pantalla Configuración de celda de trabajo.
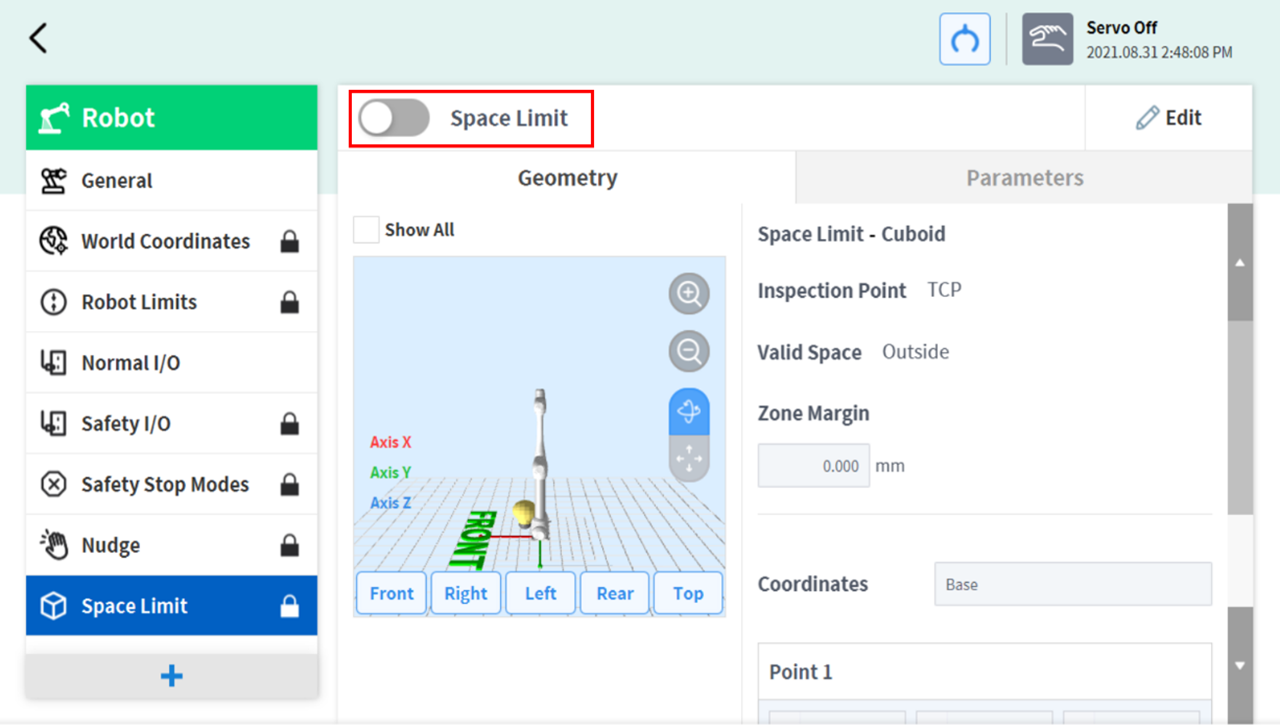
- Establezca la información de postura según la forma del límite de espacio junto con el punto de inspección, el espacio válido y el margen de inspección en la pestaña Geometría.
- Establezca la Habilitación de zona dinámica y las Opciones avanzadas en la pestaña Parámetros , y pulse Borrador.
- Compruebe que todos los parámetros que se muestran sean iguales a los que pretende configurar; luego marque Confirmar borrador y pulse Confirmar.
- Presione el botón para activar la alternancia para aplicar el límite de espacio.
Nota
Hay valores predeterminados de margen de zona relacionados con los métodos de configuración.
- Si la forma de la herramienta está configurada y Body volume check no está seleccionado, el margen del TCP es de 0 mm.
- Si la forma de la herramienta está configuraday Body volume check está seleccionado, el margen del punto central de la herramienta (TCP) es de 0 mm.
- Si la forma de la herramienta no está configurada y Body volume check no está seleccionado, el margen del TCP es de 0 mm.
- Si la forma de la herramienta no está configurada y Body volume check está seleccionado, el margen del TCP es de 60 mm.