
Pantalla de modo real: Pestaña de información del efector final
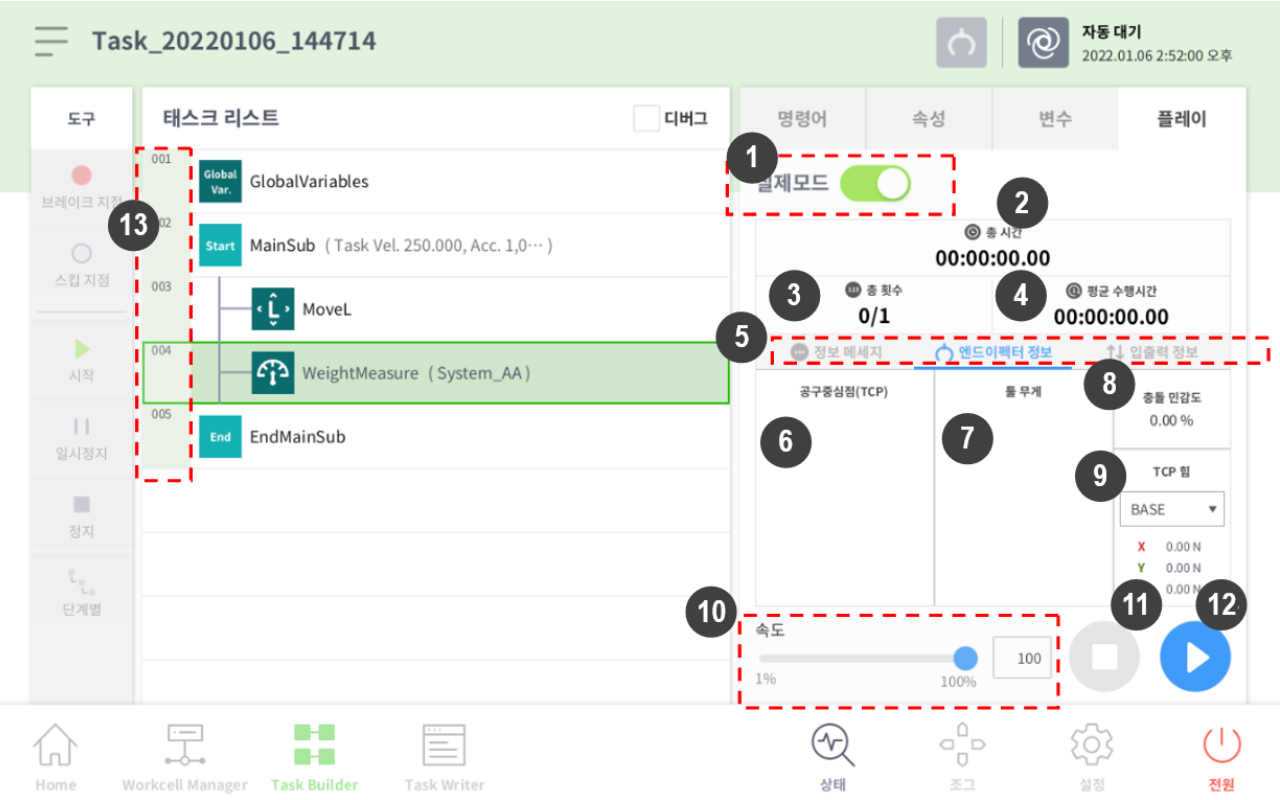
La pestaña de información del efector final de la pantalla de modo real de Task Builder está estructurada de la siguiente manera:
N.º | Elemento | Descripción |
1 | Real Mode ( | Establece el modo de reproducción de prueba del robot.
|
2 | Total time | Muestra el tiempo total transcurrido luego de la ejecución de la tarea. |
3 | Total count | Muestra la cantidad total de ejecuciones de tareas. |
4 | Average execution time | Muestra el tiempo promedio destinado a ejecutar un ciclo de la tarea en la lista de tareas. |
5 | Information Screen Shift Tab | Puede cambiar entre la pantalla de mensajes de información del robot, la pantalla de información del efector final y la pantalla de información de entrada/salida.
|
6 | Tool center point information area | Muestra la información del centro de la herramienta configurada mediante las funciones de configuración de peso y centro de la herramienta del comando TCP o el avance. |
7 | Tool weight information | Muestra la información del peso de la herramienta configurada mediante las funciones de configuración de peso y centro de la herramienta del comando TCP o el avance. |
8 | Collision information area | Muestra el valor de sensibilidad de colisión establecido para el área donde el robot está posicionado actualmente. |
9 | Force information area | Muestra la información sobre fuerza que ocurre en los sistemas de coordenadas de referencia, de usuario, geográficas o base. El sistema de coordenadas de referencia muestra la fuerza en función de la información del sistema de coordenadas de referencia aplicado al robot. |
10 | Speed slider | Establece la velocidad del robot en modo real o virtual. |
11 | Stop button | Detiene la tarea en curso. |
12 | Execute/pause toggle button | Ejecuta o pausa el trabajo en la lista de tareas. |
13 | Time | Muestra el tiempo empleado en la ejecución del comando o la habilidad correspondiente. |

Precaución
- Antes de ejecutar una tarea, ejecute la tarea en modo virtual para comprobar que la tarea funcione como está previsto.
- Se recomienda probar el programa del robot designando waypoints temporales fuera del espacio de trabajo de otra máquina. Doosan Robotics no es responsable de ningún daño que ocurra debido a errores de programación o al mal funcionamiento del robot, así como daños al equipo.
- El botón de parada de emergencia está ubicado en el teach pendant. En una situación de emergencia, pulse el botón de parada de emergencia para detener el robot.
En el caso de los modelos sin sensor de par de fuerza, no se controlan los valores de fuerza (X, Y, Z).