
Configurando el Robot
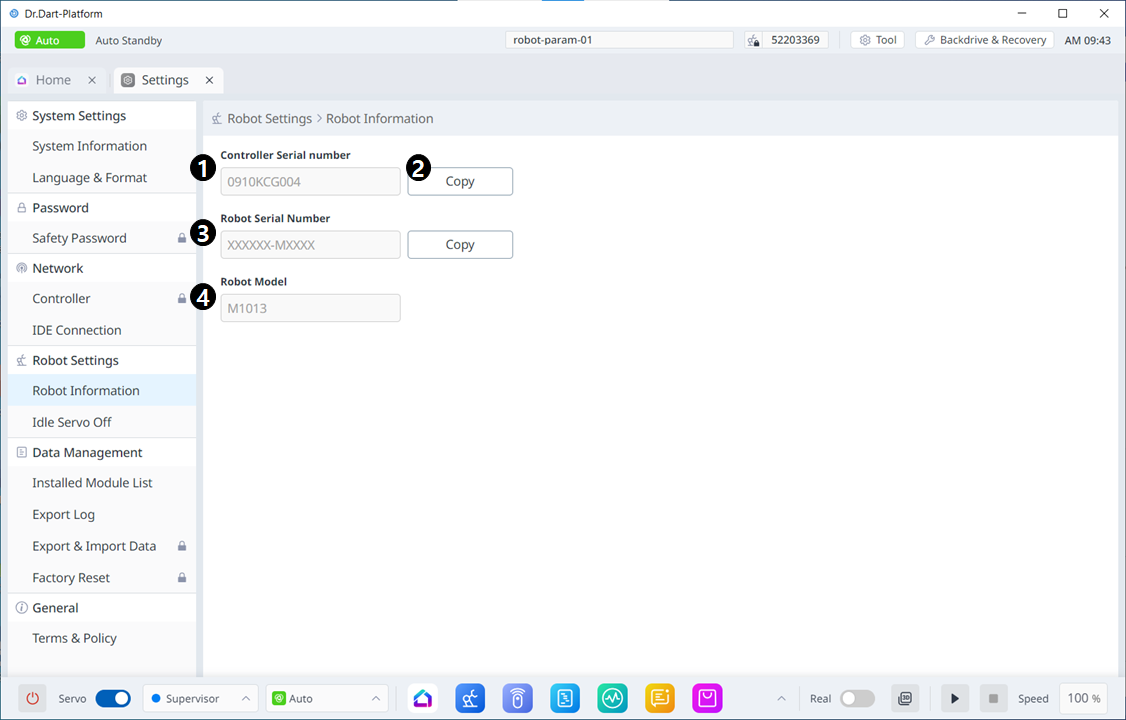
Configuración de la información del robot
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Controlador Número de serie | Aquí es donde se ve el número de serie del controlador. |
| 2 | Copiar el número de serie del controlador | Este botón le permite copiar el número de serie. |
| 3 | Número de serie del robot | Aquí es donde se ve el número de serie del robot. |
| 4 | Modelo de robot | Aquí es donde se ve el nombre del modelo del robot. |
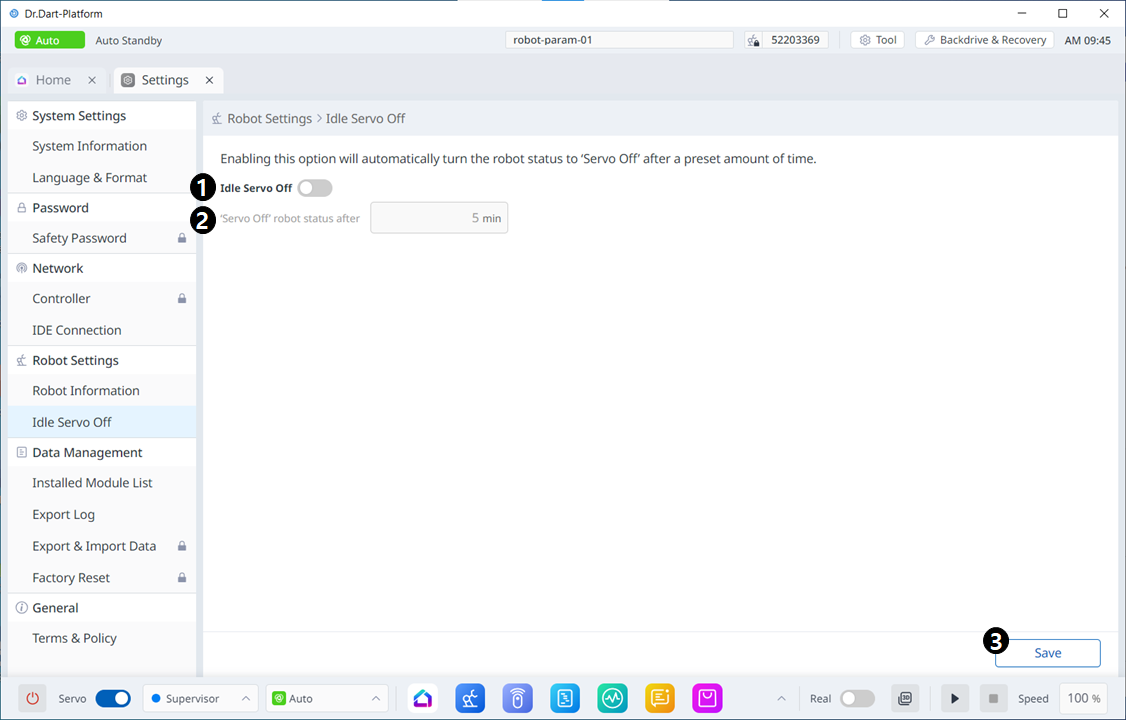
Robot Idle Servo apagado
Si el robot está inactivo durante un cierto período de tiempo, el robot se establece automáticamente en el estado Seguridad desactivada. El valor predeterminado es 5 minutos, pero el tiempo se puede cambiar a un tiempo que el usuario prefiera.
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Activar Servo en ralentí desactivado | Este botón le permite activar la desactivación del servo de ralentí. |
| 2 | Ajuste de servo desactivado | Este campo es donde se configura el apagado del servo en reposo en minutos. |
| 3 | Guardar | Este botón le permite guardar el valor que estableció. |
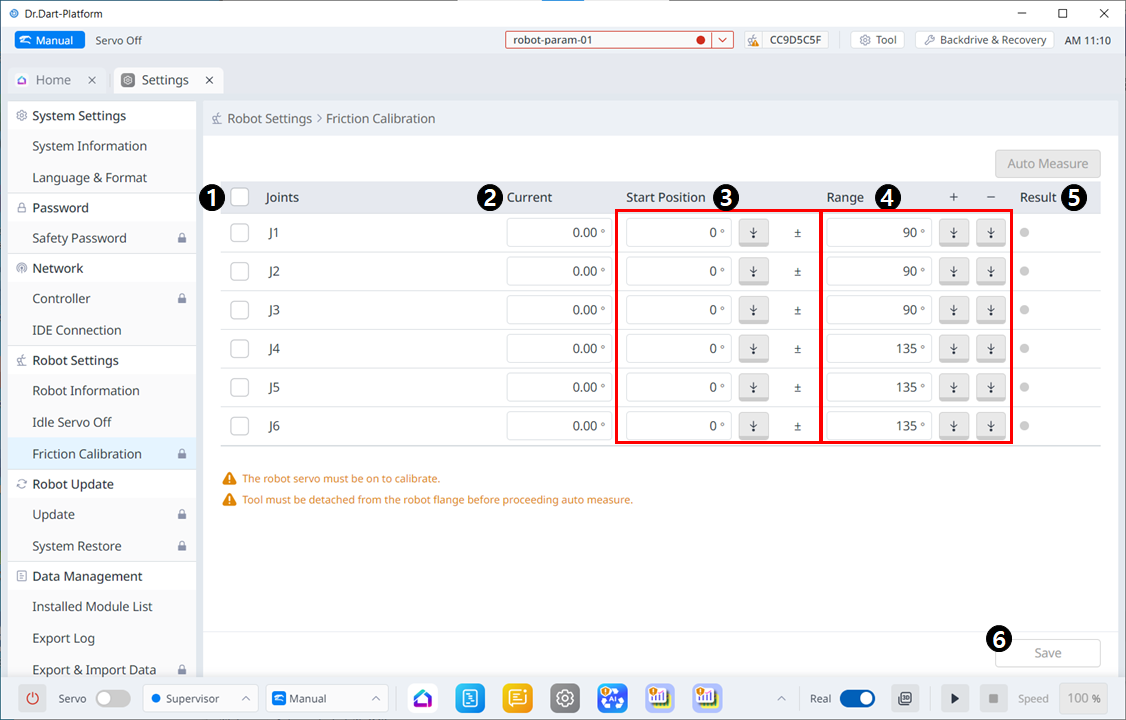
Calibración de fricción
Este menú solo es accesible para robots de la serie E y A.
Menú
Temas | Descripción | |
|---|---|---|
| 1 | Casilla de verificación conjunta | Seleccione el Joint to Auto Measure. |
| 2 | Actual | Muestra la postura actual del robot. |
| 3 | Posición de inicio | Introduzca la postura en la que la articulación comenzará al realizar Auto Measure. Los ejes no seleccionados también requieren entrada. |
| 4 | Rango | Introduzca el rango en el que se moverá el eje. Solo los ejes comprobados permiten la entrada. |
| 5 | Resultado | Muestra los resultados de Auto Measure. |
| 6 | Guardar | Los resultados medidos se aplican a los subordinados. |