Límite de espacio y configuración de zonas
Frecuentes
El área efectiva se puede seleccionar como Interior / Exterior.
El tipo de forma se puede seleccionar como esfera, cilindro, cuboide, cuboide inclinado o caja multiplano. Para obtener más información, consulte Límite de espacio y forma de las zonas.
Fijación del límite de espacio
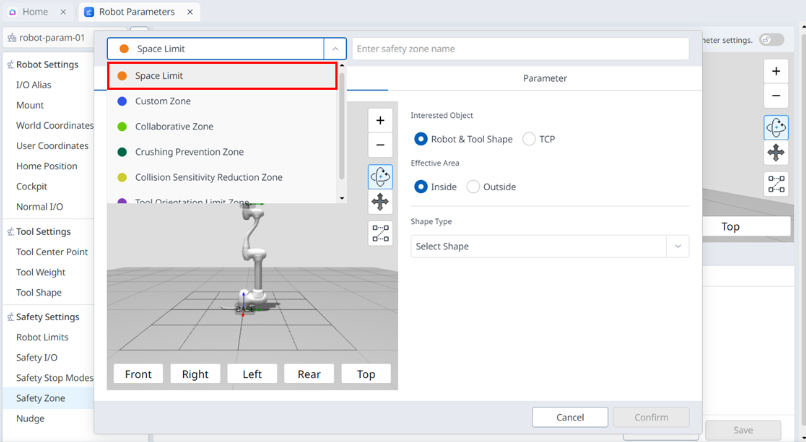
Límite de espacio es una función que establece una cerca virtual en el área más externa del robot. Puede operar el robot sin establecer un límite de espacio, pero se recomienda establecer un límite de espacio para un uso seguro.
Puede configurarlo seleccionando 'Límite de espacio' en Robot Parameters > Zona de seguridad > Añadir > la parte superior izquierda de la ventana emergente.
Puede seleccionar una de las formas de Robot & Tool/TCP para el objeto interesado.
El robot debe estar dentro del área límite de espacio establecida para ser establecida normalmente.
Nota
Dependiendo de cómo lo establezca, el valor predeterminado de Space Expansion existe.
Ajuste de la forma de la herramienta, al seleccionar 'TCP' para la inspección, valor de margen TCP 0mm
Ajuste de la forma de la herramienta, al seleccionar "Forma de robot y herramienta" para la inspección, valor de margen TCP 0mm
La forma de la herramienta no está establecida, al seleccionar 'TCP' para la inspección, valor de margen TCP 0mm
La forma de la herramienta no está establecida, al seleccionar "Forma de robot y herramienta" para su inspección, valor de margen TCP 60 mm
Configuración de la zona personalizada
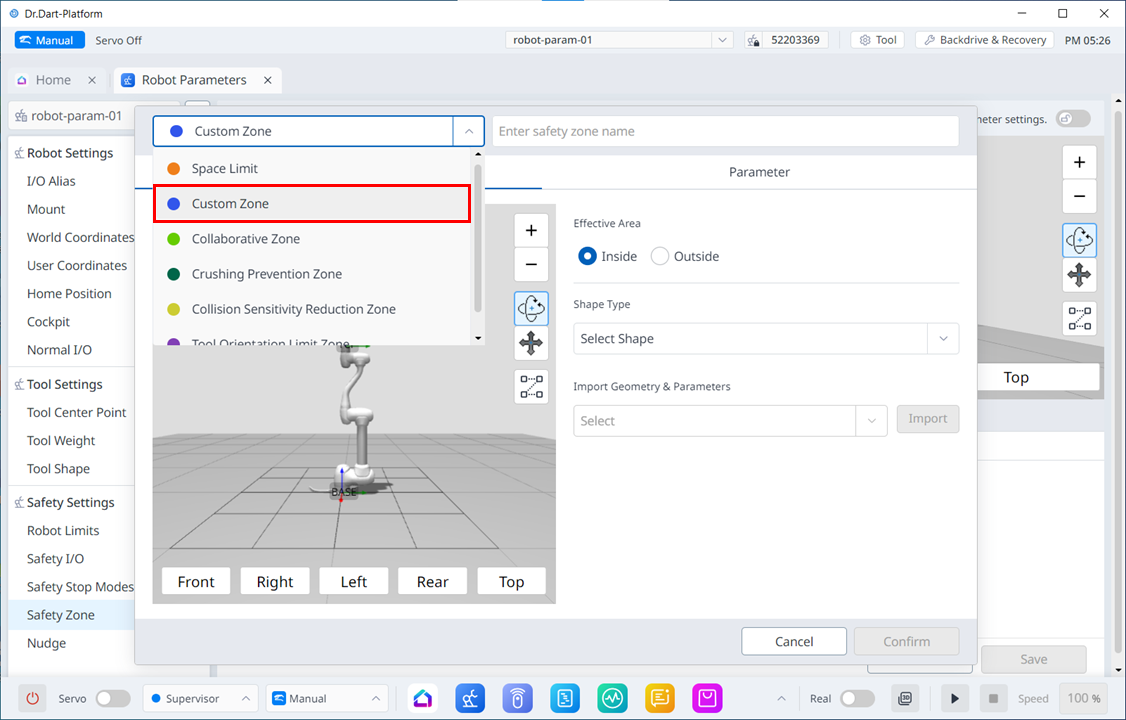
Custom Zone es la zona de seguridad más flexible donde puede establecer libremente los parámetros de seguridad. Puede configurar todos los ajustes, como límites de robot, modo de parada segura, velocidad de unión y límites de ángulo para satisfacer sus necesidades.
Puede configurarlo seleccionando ‘Zona personalizada’ en Robot Parameters > Zona de seguridad > Añadir > pop-up arriba a la izquierda.
Nota
Si TCP está en una posición en la que se superponen varias áreas, las siguientes reglas se aplican individualmente para cada característica de seguridad.
Modo normal
Si no se establecen high priority zones, el valor límite de seguridad más restringido de las zonas superpuestas será el valor de referencia de inspección.
Si hay una zona establecida como una high priority zone, el valor límite para esa zona es el valor de referencia de inspección.
Si hay más de dos zonas establecidas como high priority zone, el valor límite de seguridad más relajado de las zonas será el criterio de inspección.
Reducir el modo
Si no se establecen high priority zones, el valor límite de seguridad más restringido de las zonas superpuestas será el valor de referencia de inspección.
Si hay una zona establecida en una high priority zone, la opción de anulación para esa zona determina el valor de referencia de inspección.
Si la opción de anulación no está marcada, el valor límite de seguridad más limitado entre la high priority zone y el límite global reducido será el valor de referencia de inspección.
Si la opción de anulación está marcada, la high priority zone es el valor de referencia de comprobación.
Si hay más de una zona establecida en una high priority zone, la opción de anulación para esa zona determina el valor de referencia de inspección.
Si la opción de anulación no está marcada para ninguna de las high priority zone, la zona de prioridad más alta para la que no está marcada la opción de anulación y el valor límite de seguridad más limitado del límite global reducido será el valor de referencia de inspección.
Si se marca la opción de anulación para todas las high priority zone, el valor límite de seguridad más relajado entre las high priority zone serán los criterios de inspección.
Configuración de la Collaborative Zone
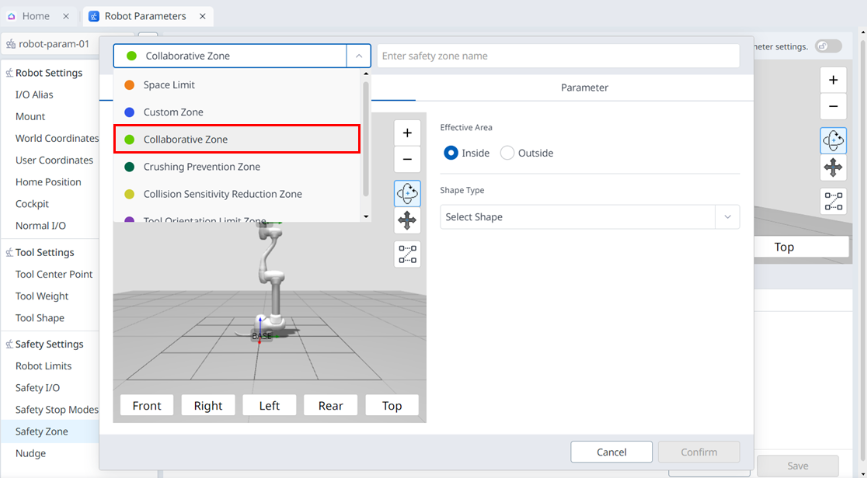
La Zona Colaborativa es una zona diseñada para trabajar de forma segura con robots. Proporciona límites de robot, como las tasas de desaceleración necesarias para el trabajo a corta distancia y ajustes de modo de parada segura.
Puede configurarlo seleccionando ‘Zona colaborativa’ en Parámetros del robot > Zona de seguridad > Añadir > La parte superior izquierda de Popup.
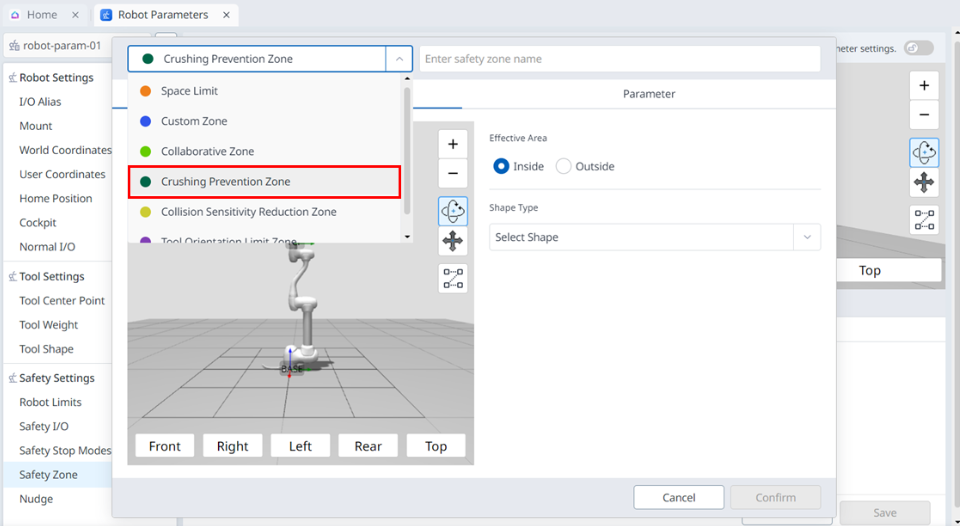
Configuración de la zona de prevención de aplastamiento
La zona de prevención de trituración es una zona para prevenir los peligros de trituración que pueden ocurrir entre el robot y otros objetos. En esta zona, cuando se viola el límite de colisión y fuerza externa, el modo de parada de seguridad se fija en RS1 (parada de reflejo) y la sensibilidad de colisión se establece en el 100%, de modo que cuando se detecta una colisión, el robot reacciona lo más sensible posible a la fuerza externa y luego se detiene con seguridad a través de la reacción flotante.
Puede configurarlo seleccionando ‘Zona de prevención de trituración’ en Parámetros del robot > Zona de seguridad > Añadir > La parte superior izquierda de Popup.
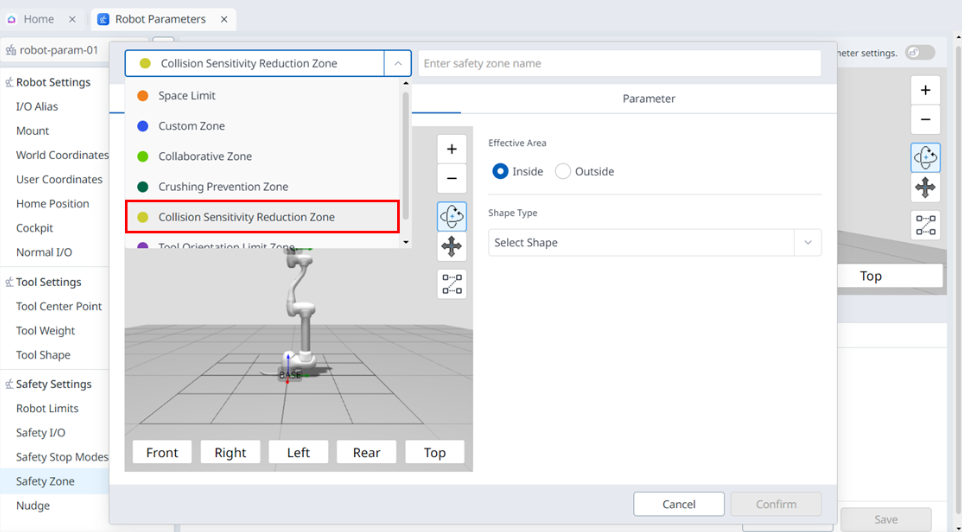
Configuración de la zona de reducción de sensibilidad a colisiones
La zona de reducción de sensibilidad de colisión es una zona que ajusta la sensibilidad de detección de colisiones del robot cuando se trabaja con diferentes materiales o superficies. Proporciona ajustes de fuerza y sensibilidad de colisión.
Puede configurarlo seleccionando ‘Zona de reducción de sensibilidad de colisión’ en Parámetros del robot > Zona de seguridad > Añadir > Parte superior izquierda de la ventana emergente.
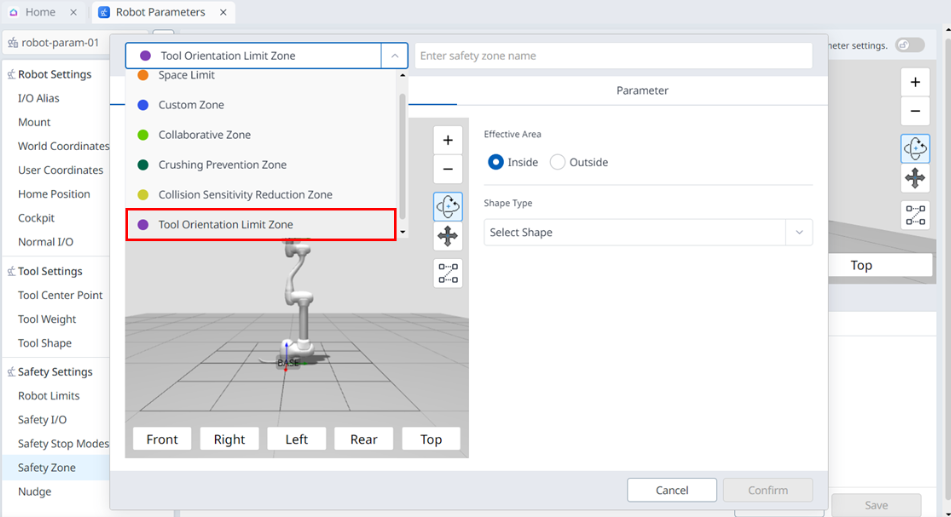
Configuración de la Zona Límite de Orientación de Herramientas
La Zona Límite de Orientación de Herramientas es una zona que limita la orientación del TCP. Asegura que el TCP se enfrenta a una dirección específica y evita que se enfrente a una dirección insegura al definir la dirección y el margen de ángulo.
Puede configurarlo seleccionando ‘Zona límite de orientación de herramientas’ en Parámetros del robot > Zona segura > Añadir > Parte superior izquierda de la ventana emergente.