
Métodos y condiciones de medición
La distancia de parada es el ángulo recorrido desde el momento en que se genera una señal de parada hasta el momento en que todo el manipulador detiene la operación.
El tiempo de parada es el tiempo desde el momento en que se genera una señal de parada hasta el momento en que todo el manipulador detiene la operación.
Los datos de distancia de parada y tiempo de parada se proporcionan para la junta 1, la junta 2 y la junta 3, que tienen grandes distancias de viaje.
El movimiento de un eje superpuesto puede causar una distancia de parada más larga.
Los datos de distancia de parada y tiempo de parada se definen según KS B ISO 10218-1:2011 Declaración y certificación.
Categoría de parada
Categoría de parada | Descripción | |
|---|---|---|
| 1 | Detener la categoría 0 | La distancia de parada y el tiempo de parada de Joint 1 (Base), Joint 2 (Shoulder) y Joint 3 (Elbow) se miden a la velocidad máxima, el nivel de estiramiento y la carga. Los ejes de Joint 2 y Joint 3 son paralelos entre sí, por lo que un impacto causado por la parada forzada en una parte puede causar un resbalón en el otro lado. La desviación del ángulo también se mide. |
| 2 | Detener la categoría 1 | La distancia de parada y el tiempo de parada de Joint 1 (Base) y Joint 2 (Shoulder) se miden al 33%, 66% y 100% de la velocidad máxima, el nivel de estiramiento y la carga, respectivamente. La distancia de parada y el tiempo de parada de Joint 3 (Elbow) se miden al 33%, 66% y 100% de la velocidad y carga máximas. El nivel de estiramiento durante la medición de Joint 3 se bloquea al máximo debido a la longitud inferior del brazo y la muñeca completamente plana. |
Poses y condiciones de medición
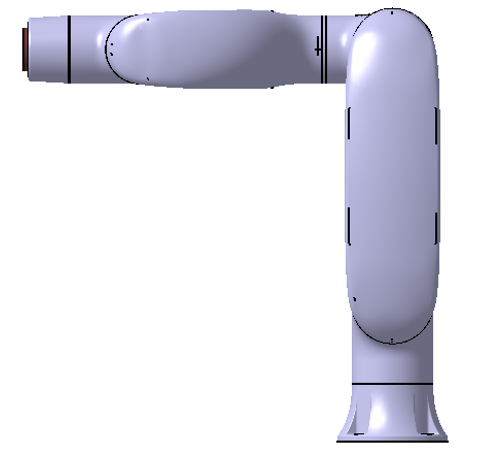
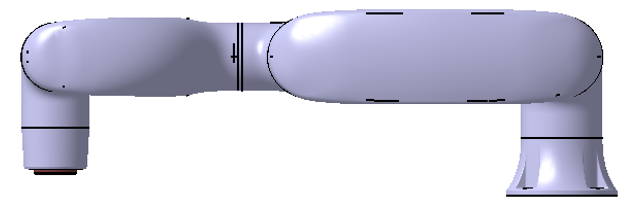
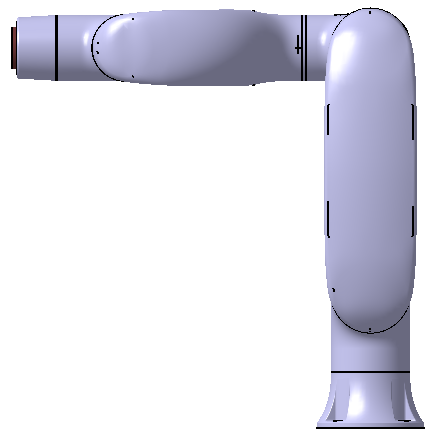
La medición de la junta 1 se realiza con el eje giratorio perpendicular al suelo y durante el movimiento horizontal.
Las mediciones de la junta 2 y la junta 3 se realizan con el eje giratorio paralelo al suelo y cuando el robot se detiene en un movimiento hacia abajo vertical al suelo.
Nota
Las mediciones son el resultado del peor de los casos. La medición puede variar según las circunstancias
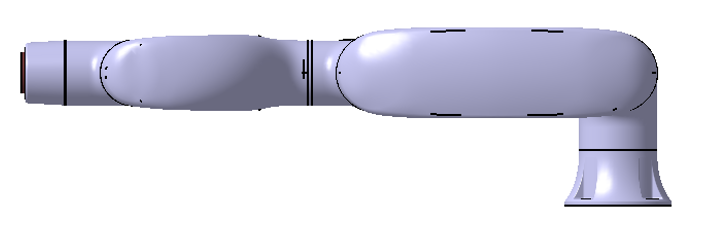
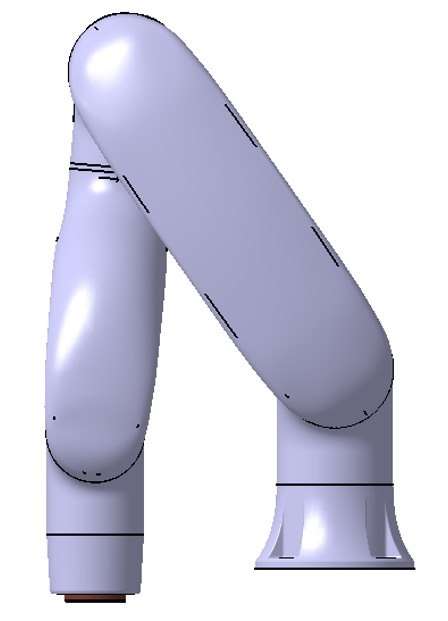
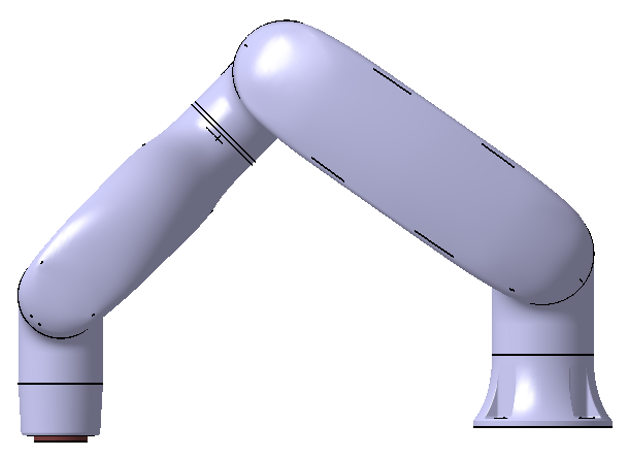
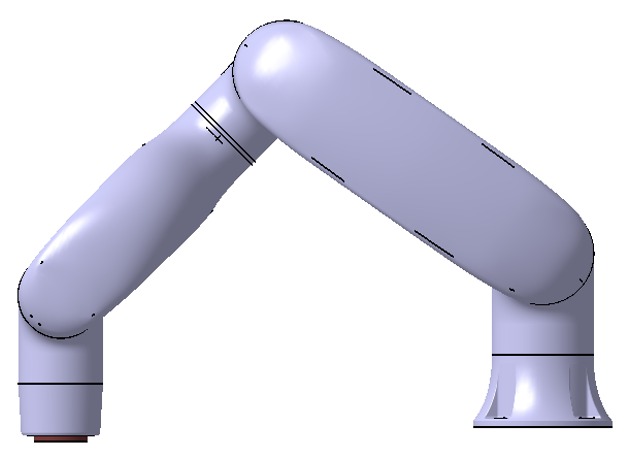
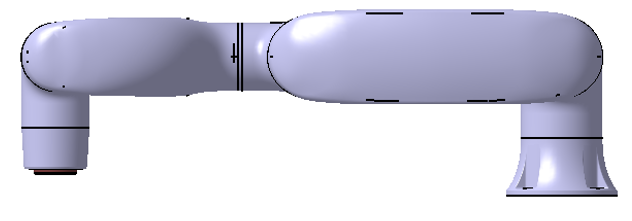
La pose para el 33%, 66% y 100% de extensión
| Articulación 1 | Articulación 2 | Articulación 3 |
100% de extensión Categoría de parada 0 |
 |
 |
 |
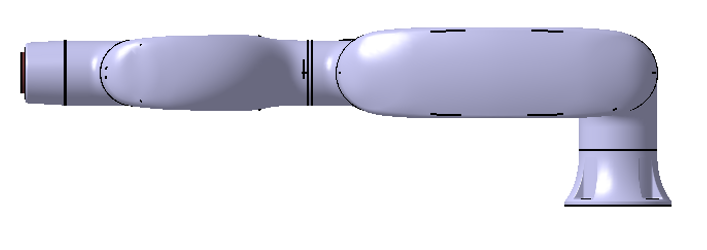
33% de extensión Categoría de parada 1 |
 |
 |
- |
66% de extensión Categoría de parada 1 |
 |
 |
- |
100% de extensión Categoría de parada 1 |
 |
 |
 |
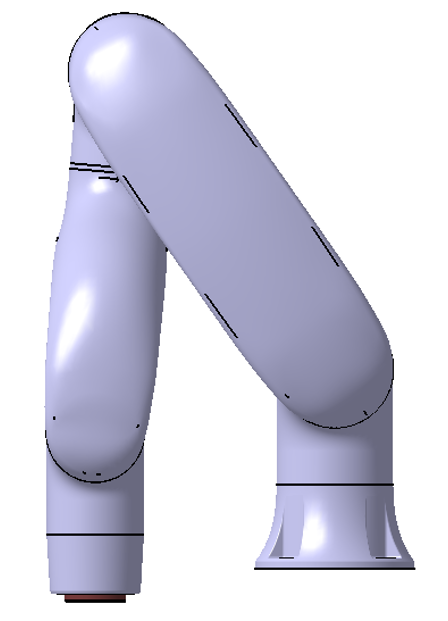
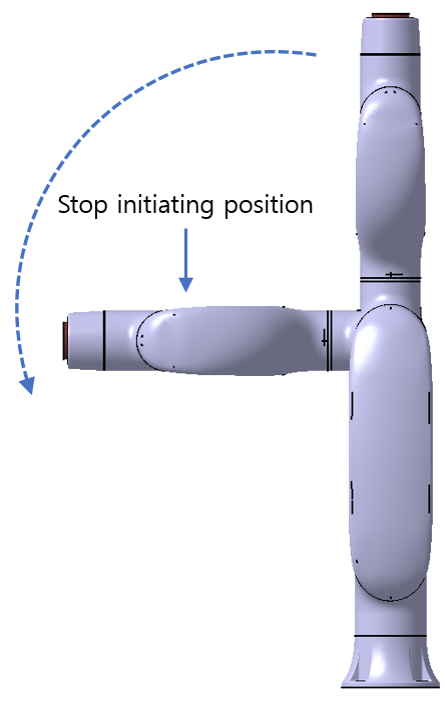
La postura cuando se inicia la parada y el ángulo medido (θd)
Pose cuando se inicia la parada | Ángulo medido | |
Articulación 1 |
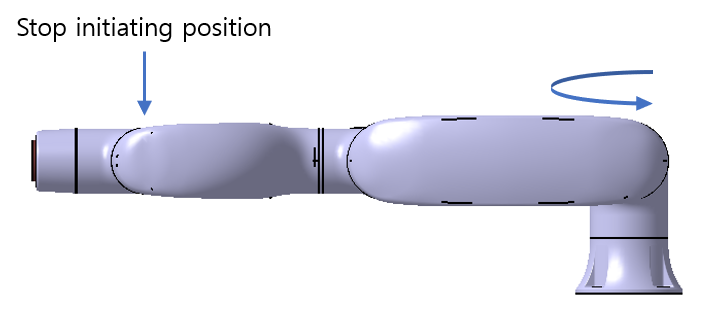 | Sin resbalón,
|
Articulación 2 |
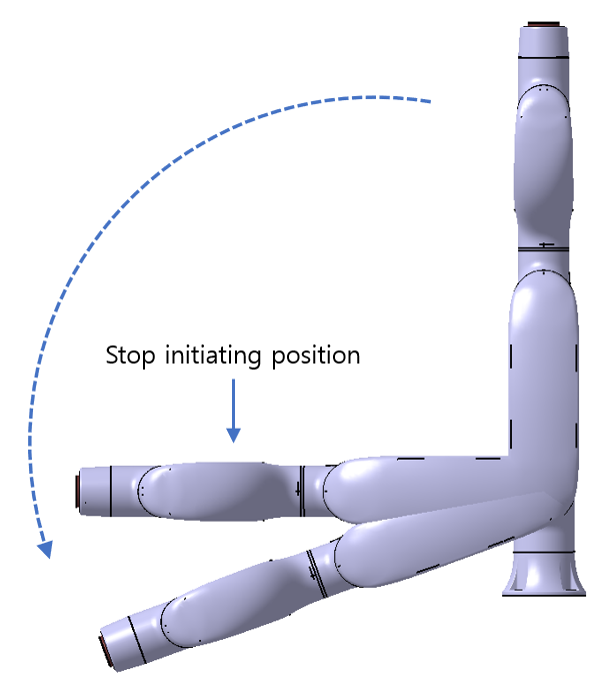 |
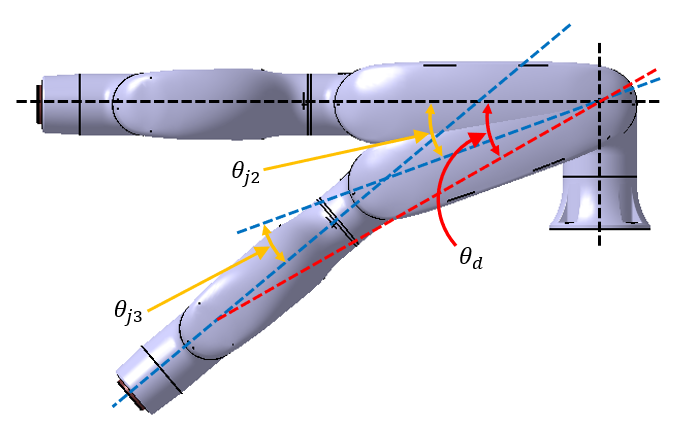 |
Articulación 3 |
 |
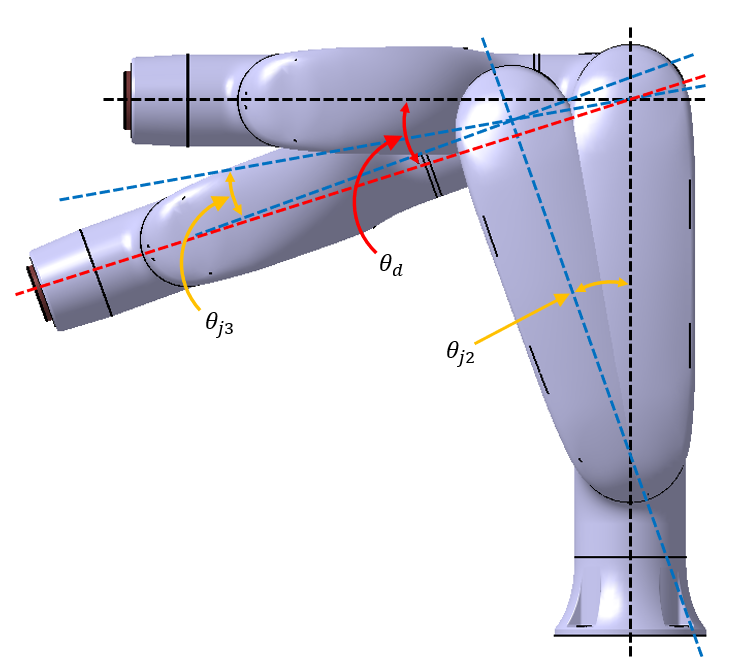 |