Conexión de dispositivos externos
Conexión de dispositivos externos - Sensor de visión
El robot se puede conectar con un sensor de visión (cámara 2D para la medición de la posición del objeto), y las mediciones del sensor de visión se pueden transferir al robot a través de una red para enlazar con los comandos del robot.
Ajuste del sensor de visión
Configuración de conexión de comunicación
Conecte los puertos LAN de los dispositivos y aplique la comunicación TCP/IP para transferir las mediciones del sensor de visión al robot. (Consulte Conexión de red) Configure la dirección IP del sensor de visión en la banda TCP/IP 192.168.137.xxx para permitir la comunicación TCP/IP.
Visión ambiente de trabajo
Para realizar la medición de la posición del objeto, es necesario tener una entrada de imagen y la enseñanza de la visión del objeto objetivo utilizando el sensor de visión. Consulte el programa de configuración de trabajo de visión dedicado proporcionado por el fabricante del sensor de visión.
Configuración de formato de datos de medición
Para utilizar los datos de medición del sensor de visión en el trabajo del robot, es necesario realizar la calibración de coordenadas de visión-robot, y esto debe realizarse antes de iniciar el trabajo utilizando el programa de ajuste del sensor de visión. Los datos de medición del sensor de visión deben transferirse utilizando los siguientes ajustes de formato:
Formato | puntos de venta | , | x | , | y | , | ángulo | , | var1 | , | var2 | , | … |
|---|
puntos de venta: Separador que indica el inicio de los datos de medición (prefijo)
x: X Valor de coordenadas del objeto medido mediante el sensor de visión
y: Y Valor de coordenadas del objeto medido usando el sensor de visión
ángulo: Valor del ángulo de rotación del objeto medido mediante el sensor de visión
Var1 … Varn: Información medida con sensor de visión (por ejemplo, dimensión del objeto / valor de comprobación del defecto) Ejemplo) pos,254.5,-38.1,45.3,1,50.1 (descripción: X=254.5, y=-38.1, angle=145.3, var1=1, var2=50.1)
Configuración del programa de robot
Cuando se complete la conexión de comunicación física entre el sensor de visión y el ajuste del robot y del sensor de visión, se debe configurar un programa para permitir que el sensor de visión y el programa del robot estén conectados. Es posible conectar/comunicar/controlar las funciones del sensor de visión externo mediante el lenguaje de robots Doosan (DRL), y es posible configurar el programa en el escritor de tareas.
Los detalles y ejemplos completos del lenguaje de robots Doosan (DRL) en funciones de sensores de visión externos se proporcionan en el manual de programación.
Conexión de dispositivo externo – DART Platform
La plataforma DART es un software que se ejecuta en un escritorio o portátil basado en el sistema operativo Windows. Una vez que el controlador y el escritorio/portátil están conectados a través del puerto LAN, todas las funciones del colgante Teach están disponibles desde el momento en que se ejecuta la Plataforma DART. En este momento, se requiere el siguiente procedimiento de configuración para conectarse con subcontroladores dentro del controlador.
Búsqueda de direcciones IP y configuración de conexión
Configuración de conexión de comunicación
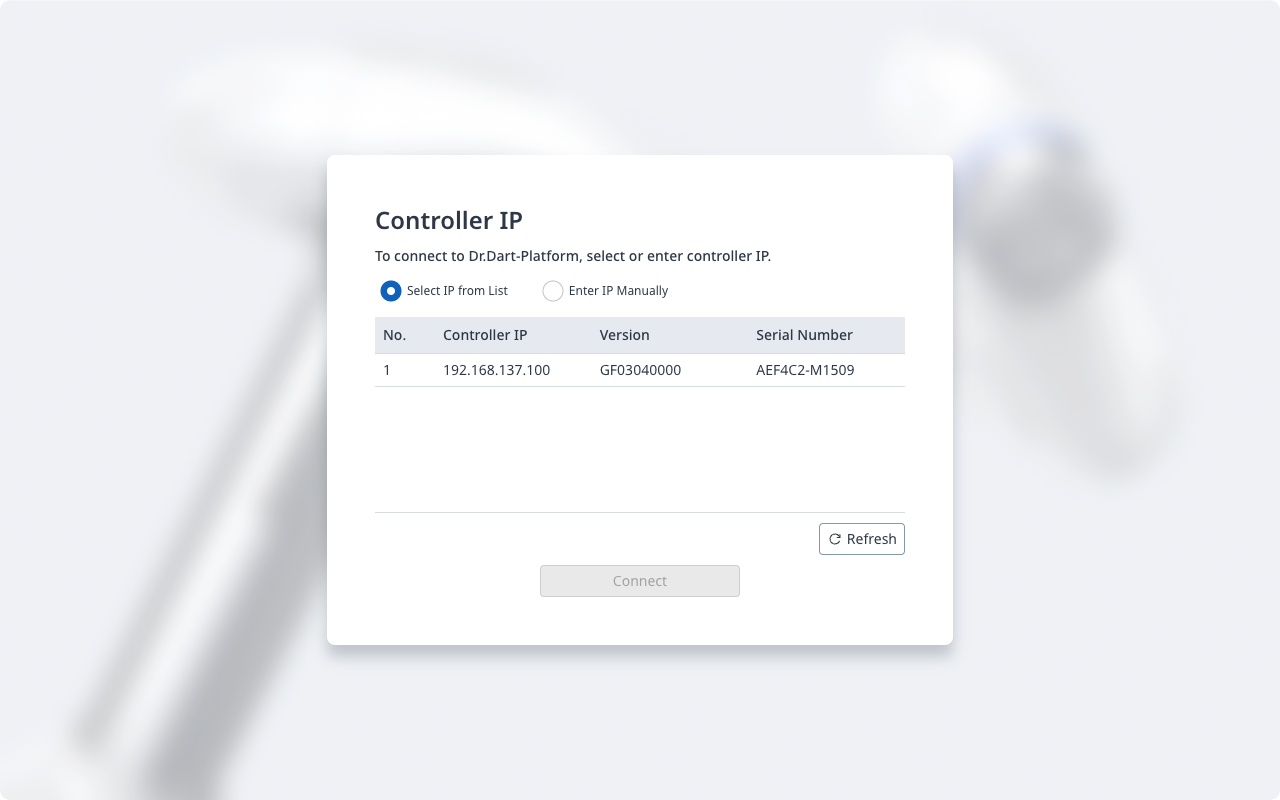
Cuando se ejecuta la plataforma DART después de conectar la computadora portátil al puerto LAN del controlador, se busca automáticamente la dirección IP del controlador, la información de versión del subcontrolador y el número de serie del robot necesario para establecer una conexión.
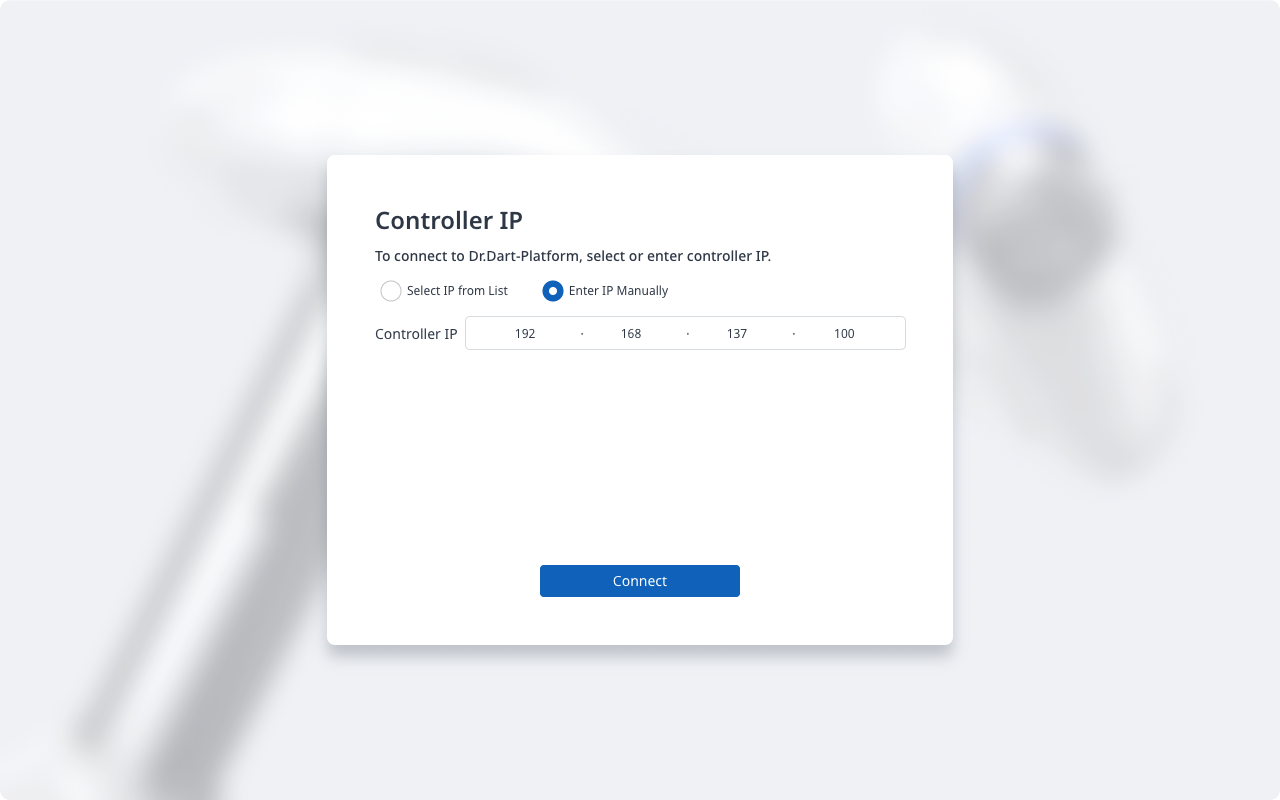
Si la búsqueda falla, presione el botón Actualizar para actualizar o toque Introducir IP manualmente para ingresar manualmente la IP del controlador.
Al seleccionar el número de serie del robot que se va a conectar y pulsar el botón Conectar, se establece una conexión entre la plataforma DART y el subcontrolador y se permite que el robot sea operado normalmente.
Si hay un problema con la conexión, pruebe el procedimiento a continuación, pero si este problema es persistente, póngase en contacto con el personal de ventas o servicio para obtener ayuda.
Si no se muestran los resultados de búsqueda de la dirección IP del controlador conectable, la información de la versión del subcontrolador y el número de serie del robot: Presione el botón Actualizar para buscar de nuevo e intente conectarse de nuevo según el procedimiento anterior.
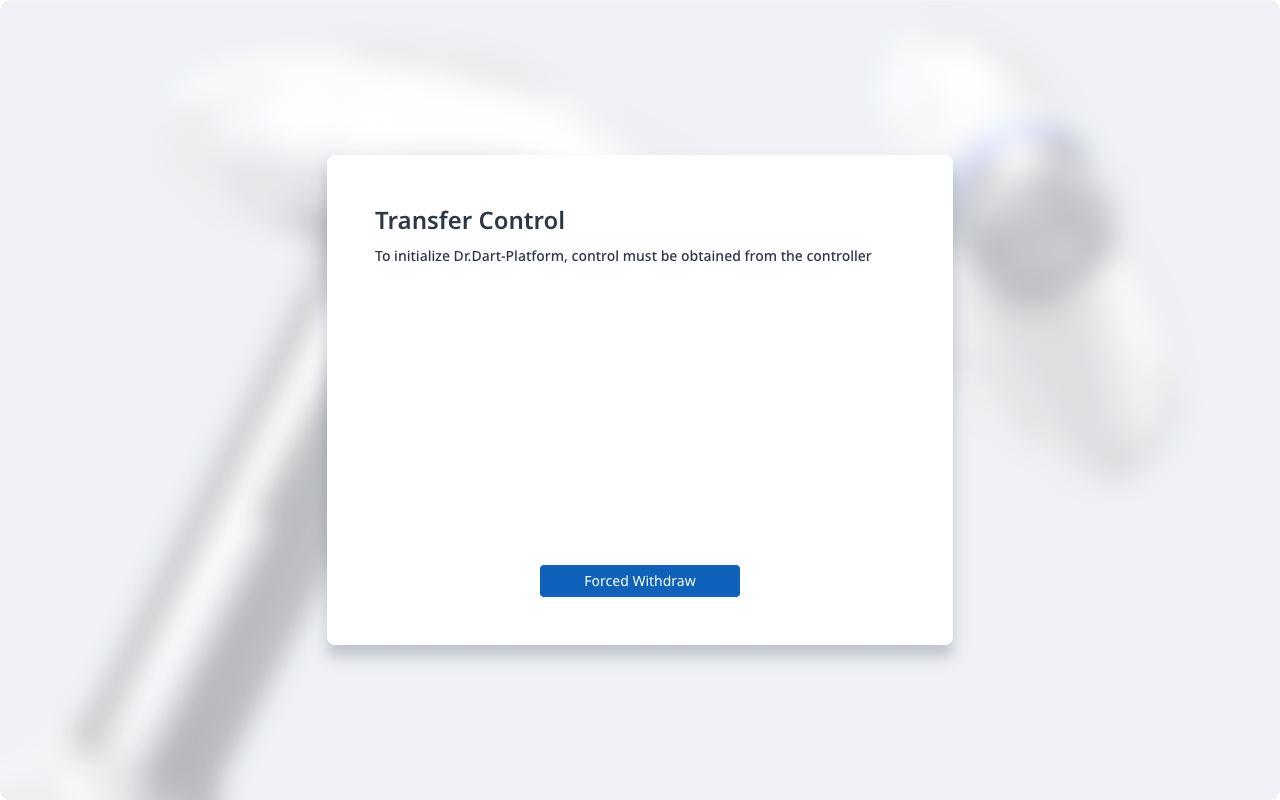
Luego, si ve la página Control de transferencia como se muestra a continuación, toque el botón Retirar forzado para intentar conectarse con la Plataforma.