
Listo para instalar el robot
Fijar el robot
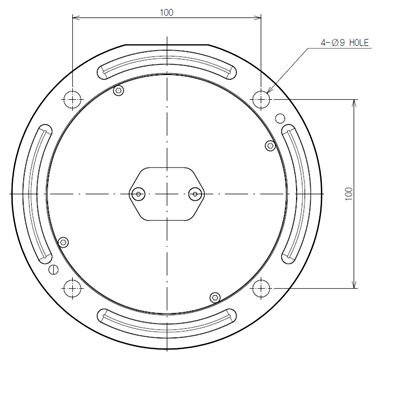
Utilice pernos M8 en los cuatro agujeros de 9.0 mm en la base del manipulador para fijar el robot.
Se recomienda utilizar un par de apriete de 20 Nm para apretar los pernos. Use arandelas (spray-flat) para evitar el aflojamiento por vibración.
Utilice Φ5 Coloque los pines de marcador para instalar con precisión el robot en una ubicación fija.
Se utiliza el dibujo base del manipulador y cuatro pernos M8, Unidad [mm]
Advertencia
Apriete los pernos todo el camino para evitar que se afloje durante la operación del manipulador.
Instale la base del manipulador en una superficie sólida que pueda soportar la carga generada durante el funcionamiento (10 veces el par máximo y cinco veces el peso del robot).
El robot interpretará la vibración de la base del manipulador como una colisión y activará la parada de emergencia. Por lo tanto, para ubicaciones de instalación que cambian de posición automáticamente, no instale la base del robot en una ubicación con alta aceleración de movimiento.
Monte el brazo manipulador en una ubicación específica utilizando los métodos apropiados. La superficie de montaje debe ser sólida.
El manipulador se dañará si entra en contacto con el agua durante un período prolongado de tiempo. No opere el robot en condiciones en las que pueda mojarse o debajo del agua.
Colocación del cable
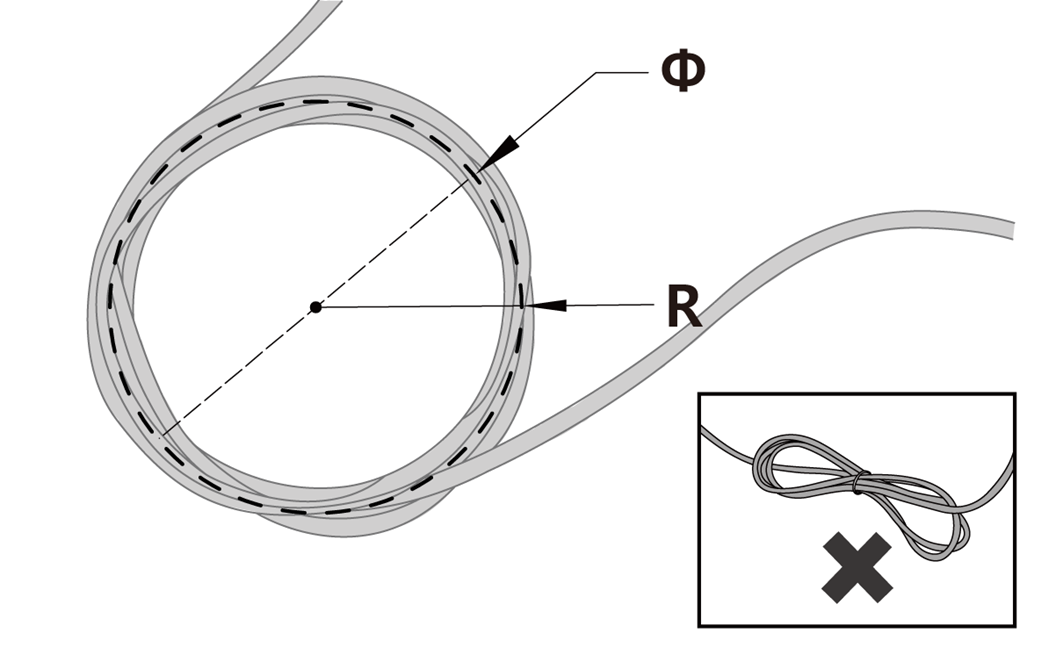
Asegúrese de que los cables tengan curvaturas mayores que el radio de curvatura mínimo. El radio de curvatura mínimo de cada cable es el siguiente:
Cable | Radio de curvatura mínimo (R) |
|---|---|
Cable del Teach Pendant | 120 mm |
Cable de robot | 120 mm |
Precaución
Asegúrese de que el radio de curvatura entre el cable colgante Teach y el conector colgante Teach es mayor que el radio de curvatura mínimo.
Si el radio de curvatura es más pequeño que el radio de curvatura mínimo, puede producirse una desconexión del cable o daños en el producto.
En entornos donde puede producirse ruido electromagnético, se debe realizar una instalación adecuada del cable para evitar fallos de funcionamiento.