
Descripción general de los conceptos básicos detrás del comando Move del Editor de tareas
Los robots Doosan Robotics ofrecen 9 movimientos. El movimiento del robot es controlado por movimientos estándar, MoveJ y MoveL, y 7 movimientos derivados de estos dos movimientos.
Tipos de movimiento de robot
Moción | Característica | |
|---|---|---|
1 | MoveJ | Cada articulación del robot se mueve desde el ángulo actual al ángulo objetivo y se detiene simultáneamente
 |
2 | MoveL | El robot se mueve al punto objetivo mientras mantiene el robot TCP recto
 |
3 | MoveSJ | El robot se mueve a través de todos los ángulos establecidos por el robot
|
4 | MoveSX | Robot TCP se mueve a través de todos los puntos
|
5 | MoveJX | La pose del robot se designa a medida que el robot TCP se mueve al punto objetivo
|
6 | MoveC | Robot TCP se mueve al punto objetivo mientras mantiene un arco 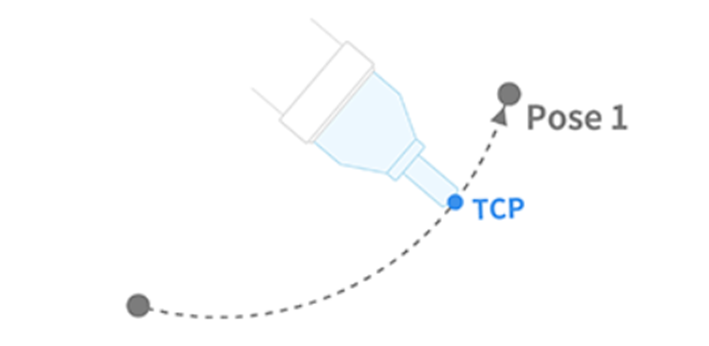 |
7 | MoveB | El robot se mueve al punto objetivo final a través de una sección que consiste en líneas rectas continuas y arcos  |
8 | MoveSpiral | El robot se mueve desde el centro espiral hasta el radio máximo 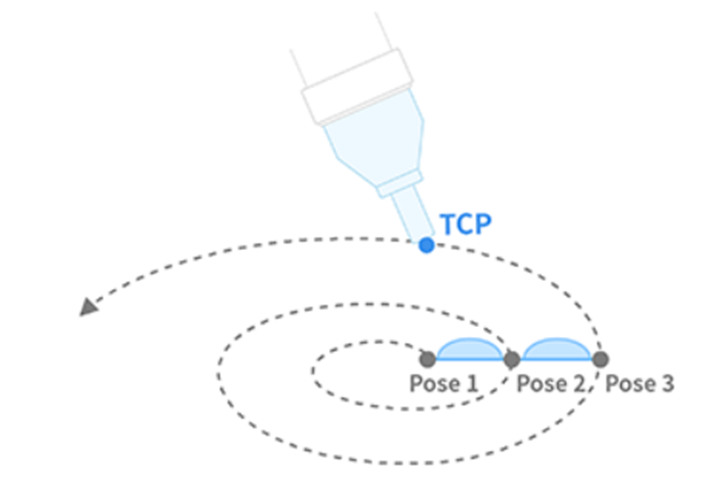 |
9 | MovePeriodic | El robot se mueve en un camino con una amplitud y ciclo constantes 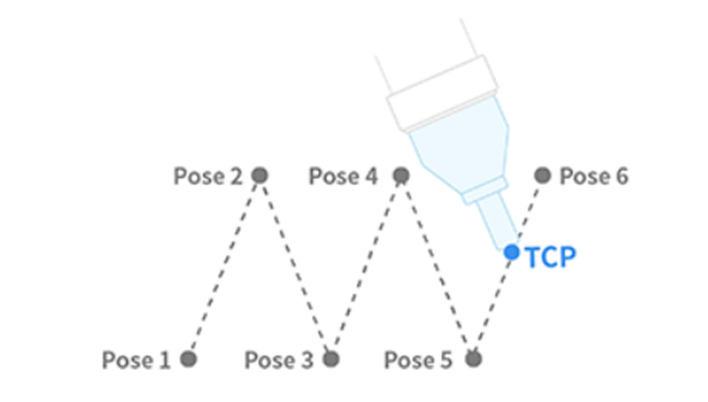 |
MoveJ&MoveL
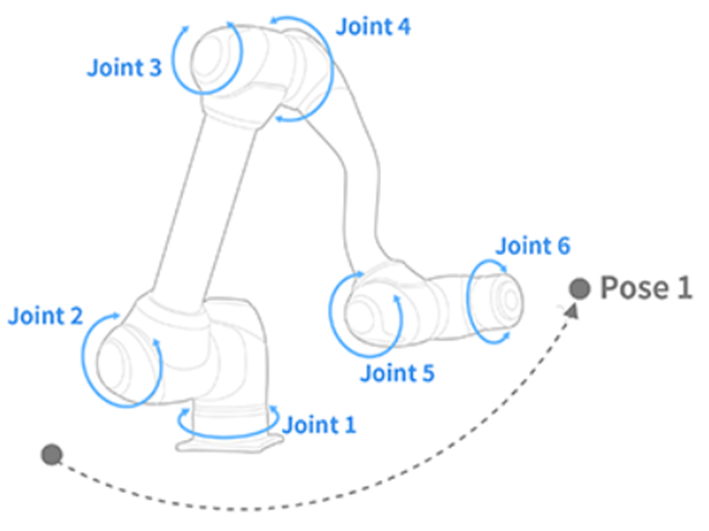
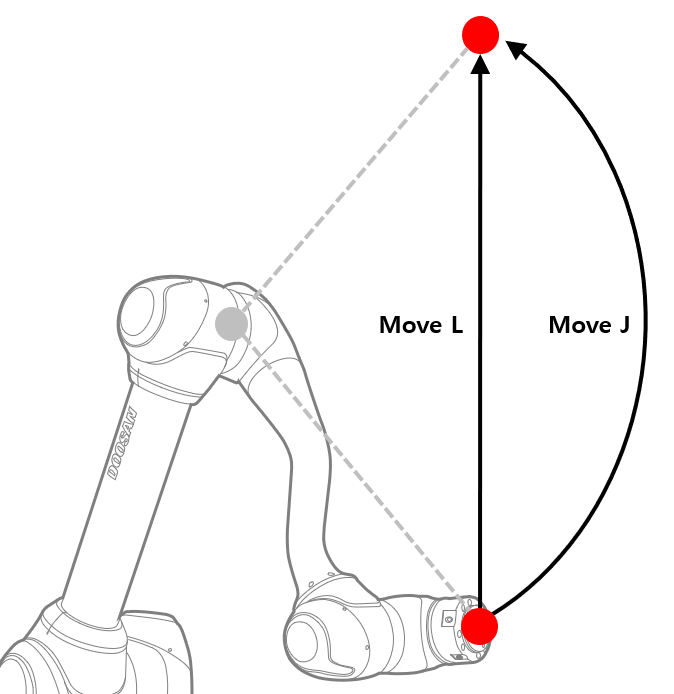
Antes de usar el movimiento del robot, es crítico entender los movimientos estándar MoveJ y MoveL.
J en MoveJ se refiere a las articulaciones. En este movimiento, cada articulación se mueve al ángulo objetivo y se detiene simultáneamente.
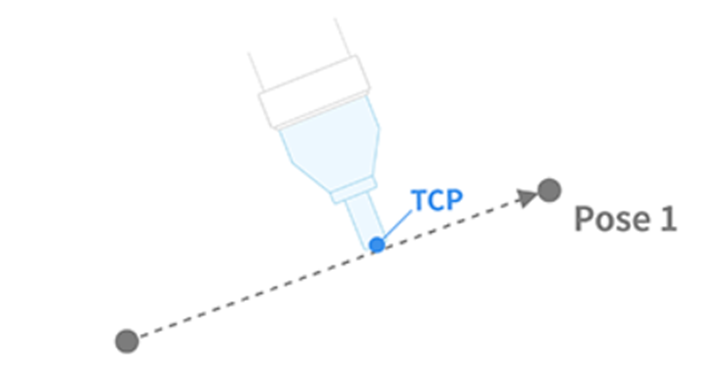
L en MoveL se refiere a lineal. En este movimiento, el TCP en el extremo del robot se mueve a la posición objetivo (posición y ángulo) con movimiento lineal.
Tipo | MoveJ | MoveL | |
|---|---|---|---|
1 | Método de movimiento |
|
|
2 | Ventaja |
|
|
3 | Desventaja |
|
|
4 | Utilización |
|
|