
Descripción general del concepto de Control de Compliance/Force(Cumplimiento/Fuerza) en el comando del editor de tareas.
El Control de Fuerza y el Control de Cumplimiento son funciones que controlan la fuerza del robot. Además, con la adición de comandos de movimiento, la fuerza se puede controlar al mismo tiempo que se realiza el movimiento. El Control de Cumplimiento y el Control de Fuerza tienen las siguientes diferencias, respectivamente.
Control de cumplimiento
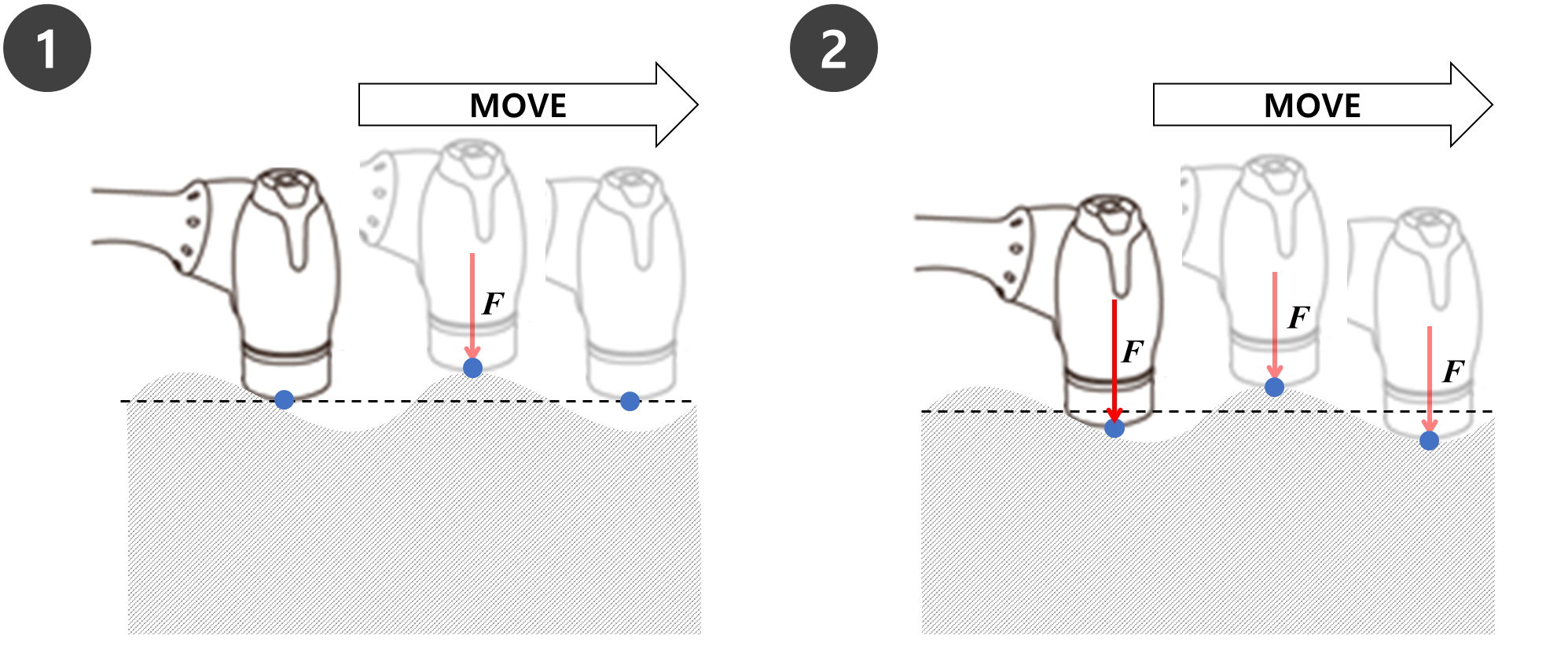
En el caso de Compliance Control, el robot cumple con la fuerza externa en el TCP final del robot y cuando se elimina la fuerza externa, se genera una fuerza para mover el robot de vuelta a donde debería estar.
Este enfoque se puede utilizar cuando un robot se mueve en línea recta sobre una superficie con baches y desea asegurarse de que el robot se mueve sin causar daños a sí mismo o a la superficie. Esto también se puede utilizar para evitar colisiones inesperadas cerca de piezas de trabajo.
Control de la fuerza
En el caso del Control de Fuerza, la fuerza se aplica al TCP al final del robot. La aceleración se genera en la dirección en la que se genera la fuerza, haciendo que el robot se mueva simultáneamente en la dirección de la fuerza además de la dirección del movimiento.
Cuando el robot entra en contacto con un objeto, la fuerza se aplica al objeto hasta que la fuerza establecida y la fuerza repulsiva del objeto estén en equilibrio
Este enfoque se puede utilizar cuando un robot se mueve en línea recta sobre una superficie con baches y desea asegurarse de que se aplica una fuerza constante a una superficie. Esto también se puede utilizar para tareas que requieren que el robot empuje con una fuerza constante, es decir, el trabajo de pulido.
Nota
Los comandos Compliance y Force se ejecutan en función de las coordenadas actuales. La coordenada predeterminada de una tarea son las coordenadas base, y las coordenadas se pueden cambiar con el comando set.
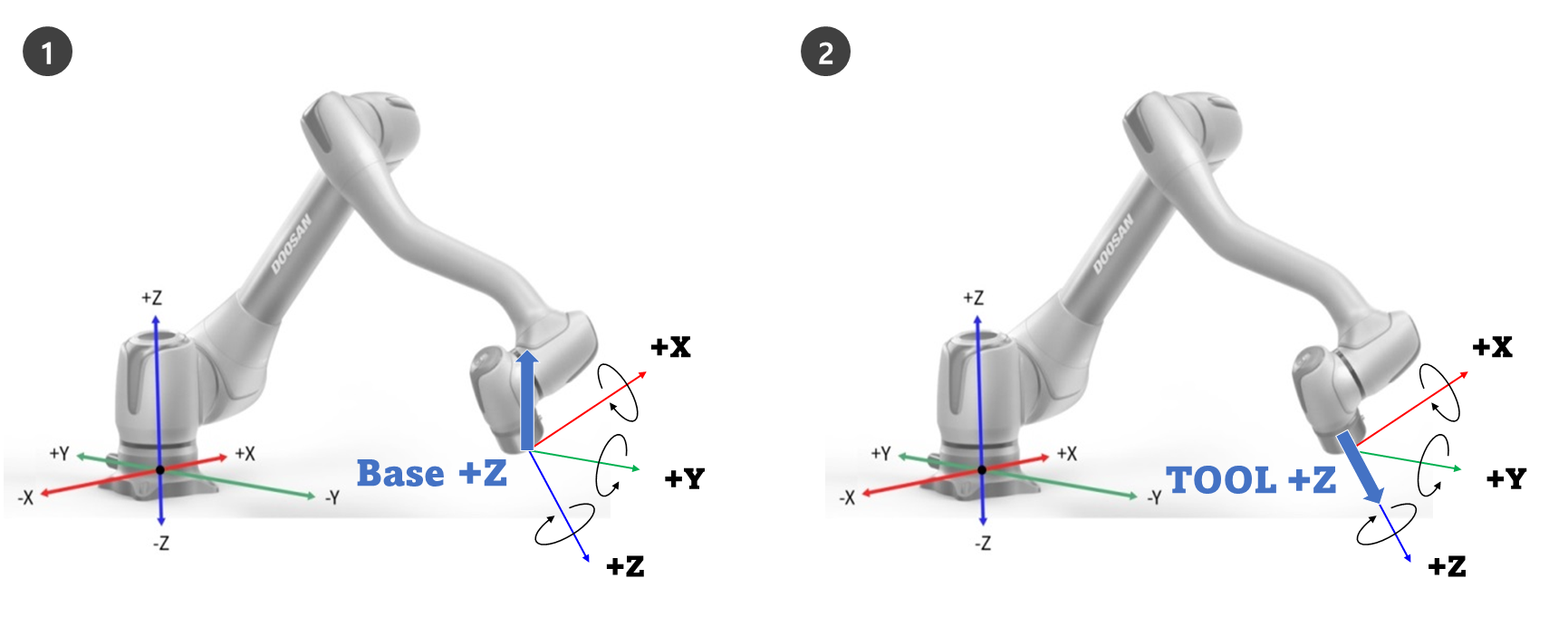
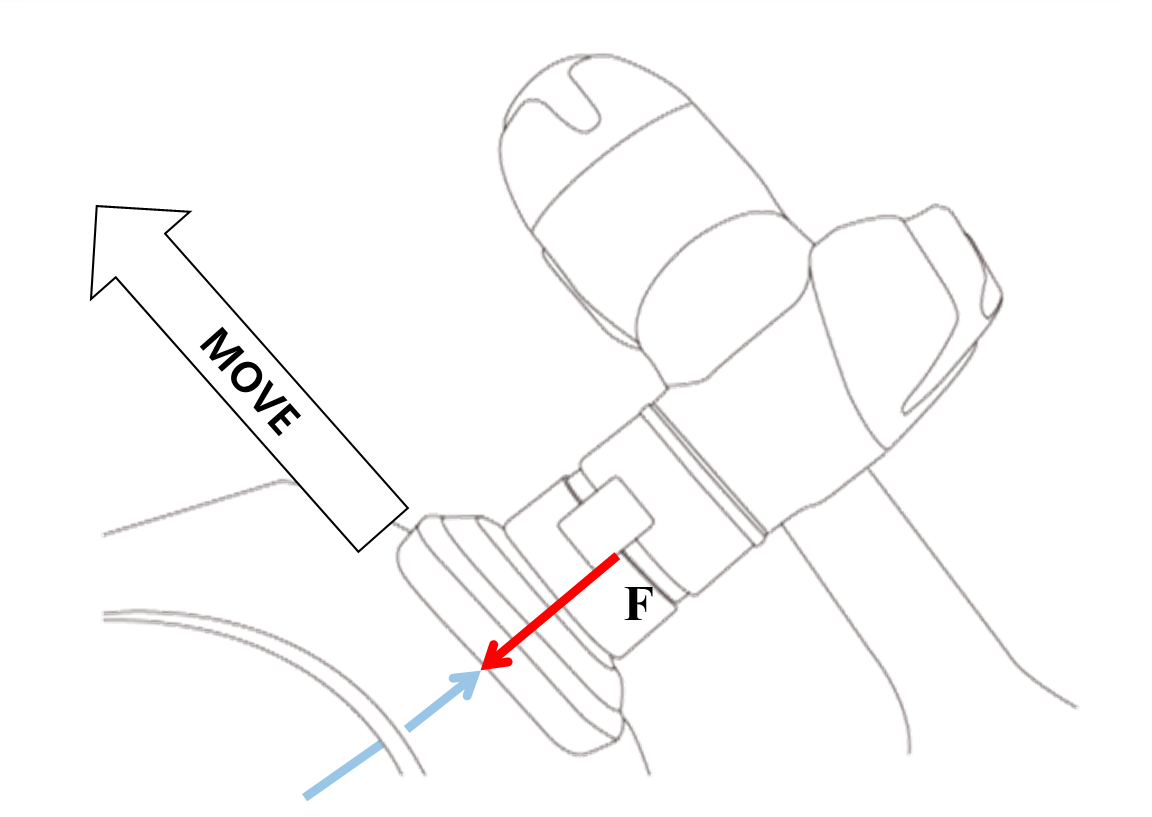
Fig. 1 es la dirección de operación cuando se aplica el control de fuerza/cumplimiento en la dirección +Z sobre las coordenadas base.
Fig. 2 es la dirección de funcionamiento cuando se aplica el control de fuerza/cumplimiento en la dirección +Z sobre las coordenadas de la herramienta.
Control de cumplimiento
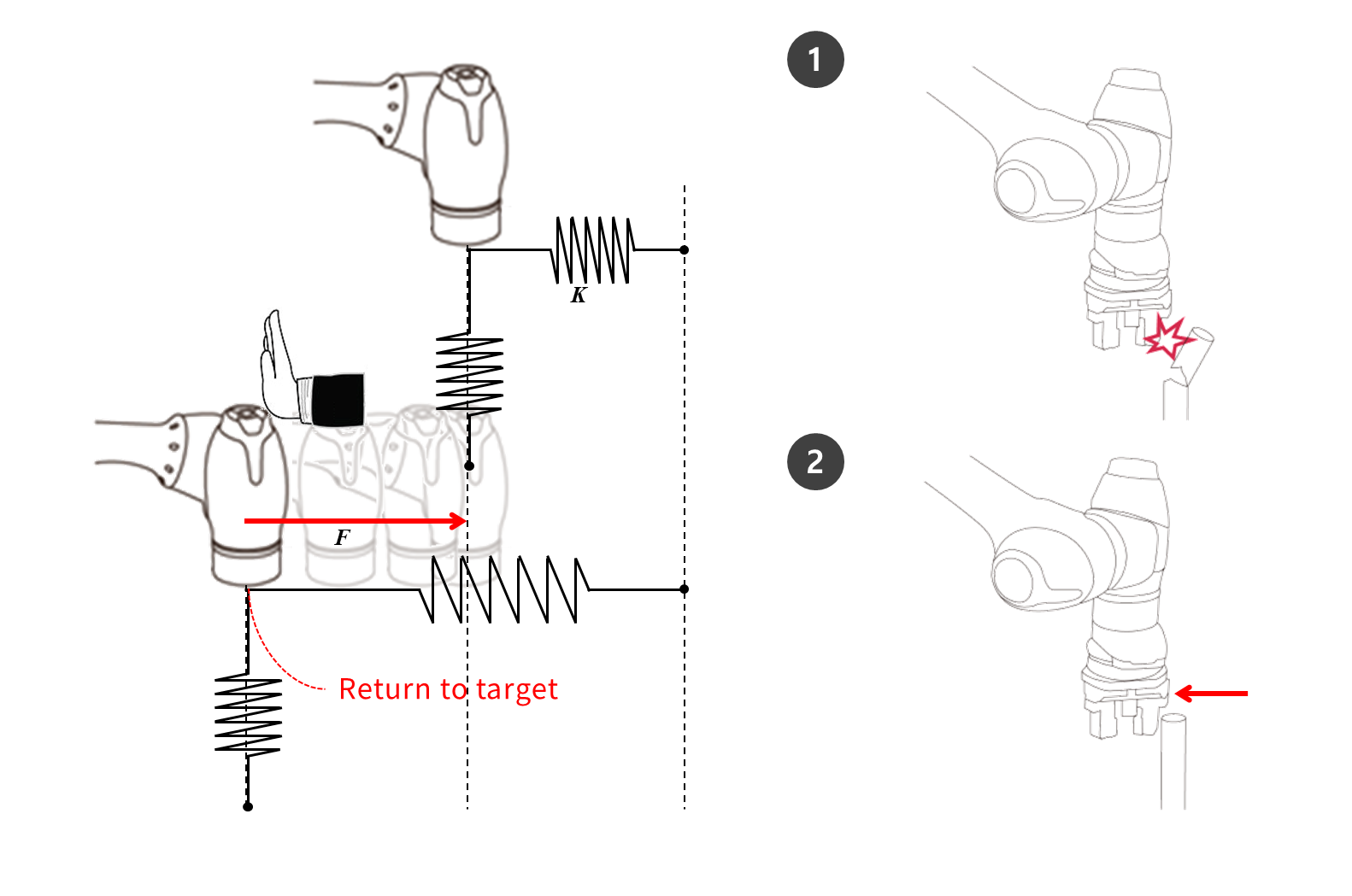
El control de cumplimiento es la función que cumple con la fuerza externa de acuerdo con la rigidez establecida cuando se aplica fuerza sobre el TCOP al final del robot. Equilibra las fuerzas en el punto objetivo, y es un método de control que genera fuerza de repulsión si el desplazamiento ocurre lejos del punto de equilibrio. Durante el control de cumplimiento, el extremo del robot rebota como un resorte.
Si se realiza una colisión cuando el control de movimiento se utiliza solo, es posible que el objeto colisionado pueda dañarse.
Los robots de Doosan Robotics se detienen de forma segura cuando se produce una colisión, pero dependiendo de la configuración del usuario, como los límites de seguridad > Sensibilidad a la colisión, pueden ocurrir las siguientes situaciones.
Si el control de cumplimiento se establece en ON durante el control de movimiento, el robot se moverá mientras cumple con el objeto colisionado.
Si F es fuerza externa, K es rigidez y X es distancia, las siguientes fórmulas son verdaderas.
F = K * X
K = F / X
X = F / K
Según las fórmulas anteriores, si la rigidez del control de cumplimiento se establece en 1000N/m y si el robot se mueve 1 mm, la fuerza externa generada es 1N.
F=1000 N/m*0,001 m=1 N (0,001 m=1 mm)
Nota
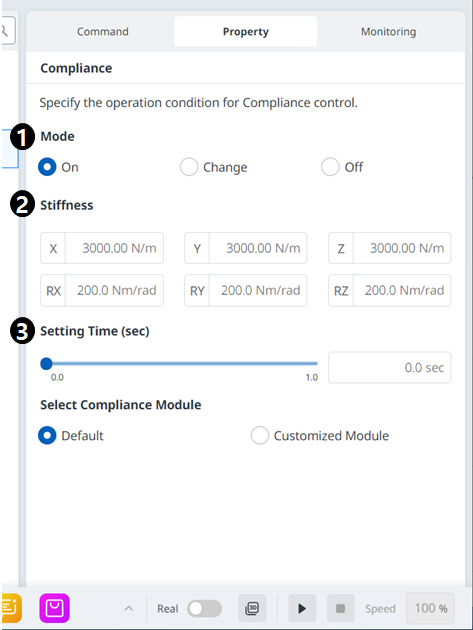
En el comando Propiedad del cumplimiento, se pueden establecer los siguientes valores:
Modo
Sobre: Permite el control de cumplimiento
Cambio: Si el modo de cumplimiento se establece en ON, cambia a rigidez
Apagado: Deshabilita el control de cumplimiento
Rango de rigidez
Serie M/H: Traducción (0~20000N/m), rotación (0~1000nm/rad)
Serie A: Traducción (0~10000N/m), rotación (0~300nm/rad)
Los valores de rigidez más bajos responderán a la fuerza externa con más suavidad y requerirán más tiempo para volver al punto objetivo
Tiempo de fijación
Es el tiempo requerido para que el valor de rigidez actual alcance el valor de rigidez establecido (0-1s)
Precaución
El peso de la herramienta y el TCP (Tool Center Point) deben ajustarse con precisión. El peso inexacto de la herramienta puede hacer que el robot detecte el peso de la herramienta como fuerza externa, y si se activa el comando de cumplimiento se generará un error de posición.
La tensión del paquete de vestidos puede generar torque externo en el robot. Por lo tanto, tenga precaución al instalar el paquete de vestidos.
El cumplimiento no se puede activar o desactivar mientras se está ejecutando el movimiento asinc o el movimiento de mezcla.
Durante Command On, solo se permite el movimiento lineal. Los movimientos conjuntos, como MoveJ y MoveSJ, no están permitidos.
Durante el comando de cumplimiento activado, el peso de la herramienta o el TCP no se pueden cambiar.
Durante el Comando de cumplimiento, es posible no alcanzar con precisión el punto objetivo debido al cumplimiento del par generado durante la ejecución del movimiento. Por lo tanto, se recomienda activar el control del cumplimiento cerca del punto objetivo. O bien, es posible minimizar el error de posición estableciendo un valor de rigidez grande.
Control de la Fuerza
El Control de Fuerza es una función que aplica fuerza en la dirección de control de fuerza hasta que la fuerza establecida y la fuerza de repelencia estén equilibradas
Mueve el robot en la dirección de fuerza establecida, y si se hace contacto con un objeto, mantiene la fuerza introducida (N)
Es capaz de controlar el movimiento en una dirección diferente de la dirección de la fuerza mientras aplica una fuerza constante
El ajuste mínimo es +/- 10N, y se puede ajustar con una resolución de 0,2N
El Control de Fuerza no está disponible en la zona de singularidad
n general, el control de cumplimiento se utiliza junto con el control de fuerza para que el control de fuerza cumpla con la fuerza externa
Nota
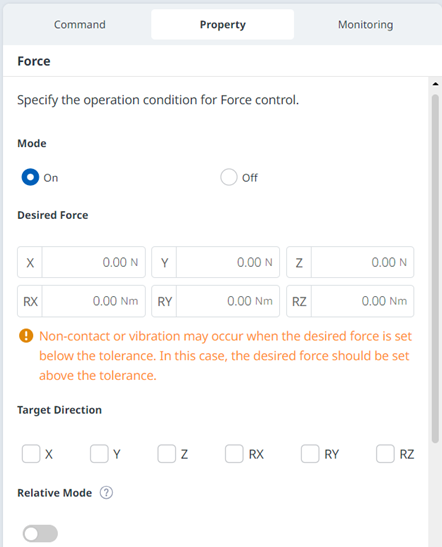
Desde la propiedad de Force Command, se pueden establecer los siguientes valores.
Modo
Sobre: Habilita el Control de Fuerza
Apagado: Deshabilita el Control de Fuerza
Rango de fuerza deseado
X, Y, Z: 10 - (el máximo de cada robot) N
A, B, C: 5 - (el máximo de cada robot) Nm
Para obtener más información sobre la fuerza máxima, consulte Rango de umbrar superior/inferior y valor predeterminado de los parámetros de seguridad.
Dirección del objetivo
Se mueve al valor objetivo seleccionado de cada dirección.
Se pueden hacer múltiples selecciones.
El control de fuerza solo se puede ejecutar con el ajuste de dirección después del ajuste de fuerza.
Si una de las múltiples direcciones seleccionadas alcanza la fuerza objetivo, continuará moviéndose hasta que se alcance el valor objetivo para la otra dirección.
Modo relativo
Si este modo está habilitado, calibra la fuerza externa aplicada en el robot a 0 para mejorar la precisión del control de fuerza.
Cuando el modo relativo está desactivado, la fuerza real que se aplica al objetivo es igual a la suma de la fuerza establecida y la fuerza externa.
Cuando el modo relativo está habilitado, la fuerza real que se aplica al objetivo es igual a la fuerza establecida.
Durante el control de la fuerza, la desviación puede ocurrir dependiendo de la postura o fuerza externa.
Durante el control de la fuerza, es posible no alcanzar el punto objetivo exacto. Por lo tanto, se recomienda habilitar el control de la fuerza cerca del punto objetivo.
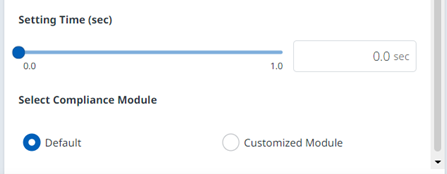
Tiempo de fijación
Es el tiempo requerido para que el valor de fuerza actual alcance el valor de fuerza establecido (0-1s)
Comando de hilo
Los hilos se pueden crear y ejecutar en el editor de tareas.
Nota
Las restricciones para los hilos son las siguientes:
Un nombre de hilo no puede comenzar con un número y solo puede contener letras minúsculas, números y subrayados. El nombre no debe exceder los 30 caracteres o duplicarse con otro nombre del hilo.
En la pantalla del editor de tareas, cuando haga clic en el comando Thread, tanto el comando Thread como el comando Finalizar Thread se agregarán al panel de lista de tareas. Se permite un máximo de cuatro hilos por tarea.
Los siguientes comandos no se pueden configurar solos y deben implementarse dentro de sentencias condicionales:
Move, Move L, Move J, Move SX,Move SJ, Move C, Move B, Move Spiral, Move Periodic, Move JX
Define, Set, Sub, Thread, Break, Weight Measure
Force Control Commands (Compliance, Force)
Signal Commands (Add Signal, Set Signal, Get Signal, Delete Signal)
Comandos avanzados (Hand guide, Nudge)
Comandos de usuario