
Brida I/O
La cubierta de la brida del extremo del robot tiene un conector de 8 pines de la especificación M8, y refiérase a la figura abajo para la ubicación y la forma.
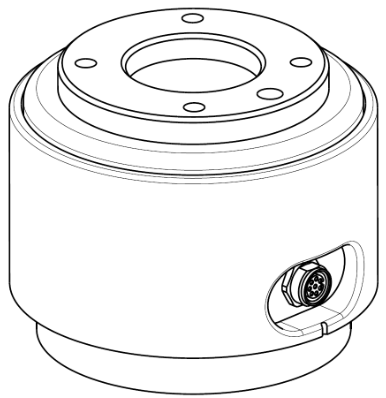
El conector suministra las señales de alimentación y control necesarias para operar la pinza o los sensores integrados dentro de herramientas específicas del robot. Los siguientes son cables industriales de muestra (se pueden utilizar cables equivalentes):
Phoenix contacto 1404178, macho (recto)
Phoenix contacto 1404182, macho (ángulo recto)
Diagrama Esquemático
El mapa del pin de cada conector es el siguiente:
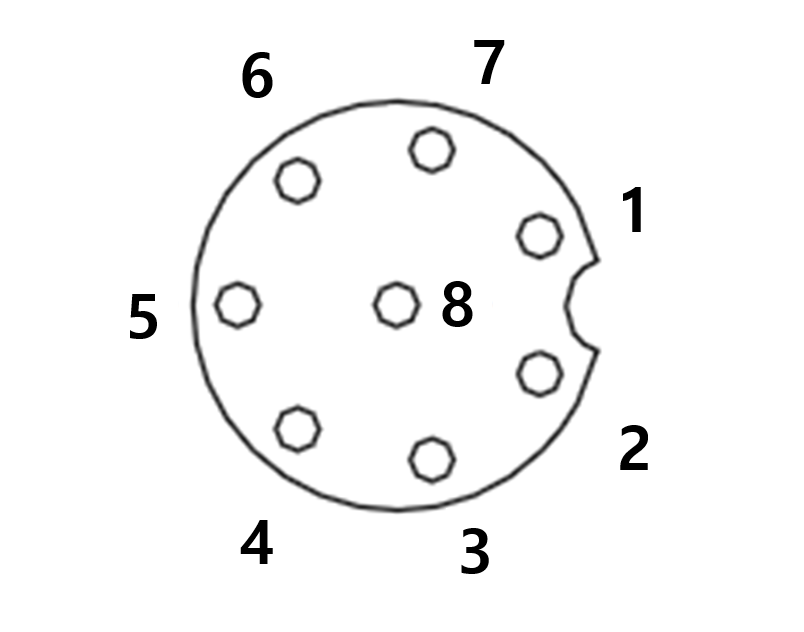
Consulte la tabla de abajo para la configuración detallada de E/S proporcionada por el conector X1.
Ajuste X1
No. | Tipo de señal | Descripción |
|---|---|---|
1 | Entrada digital 1 | PNP (Tipo de fuente, por defecto) |
2 | Salida digital 1 | Se establece en PNP (Tipo de fuente, predeterminado) o NPN (Tipo de sumidero) |
3 | Salida digital 2 | Se establece en PNP (Tipo de fuente, predeterminado) o NPN (Tipo de sumidero) |
4 | Entrada analógica 1 / RS-485 + | Ajuste en voltaje (0-10V) o corriente (4-20mA, por defecto) / Max 1M. velocidad en baudios |
5 | Poder | Ajuste la fuente de alimentación interna a +24V (por defecto), +12V o 0V |
6 | Entrada analógica 2 / RS-485 - | Ajuste en voltaje (0-10V) o corriente (4-20mA, por defecto) / Max 1M. velocidad en baudios |
7 | Entrada digital 2 | PNP (Tipo de fuente, por defecto) |
8 | GND |
La potencia inicial de entrada/salida (E/S) de la brida se ajusta a 24V y se puede ajustar a 0V o 12V.
Consulte la tabla a continuación para obtener especificaciones de potencia detalladas durante la conexión de E/S.
Parámetro | Min | Tipo | Max | Unidad |
|---|---|---|---|---|
Voltaje de alimentación (modo 12V) | 11,4 | 12 | 12,6 | V |
Voltaje de alimentación (modo 24V) | 22,8 | 24 | 25,2 | V |
Corriente de suministro | - | - | 1,5 | A |
Advertencia
Configure la herramienta y la pinza para que no causen ningún peligro cuando pt causen cualquier peligro cuando se corta la energía.
(por ejemplo, pieza de trabajo que cae de la herramienta)El terminal Nº 5 de cada conector emite 24V en todo momento mientras se suministra energía al robot, así que asegúrese de cortar la fuente de alimentación al robot al configurar la herramienta y el agarre.
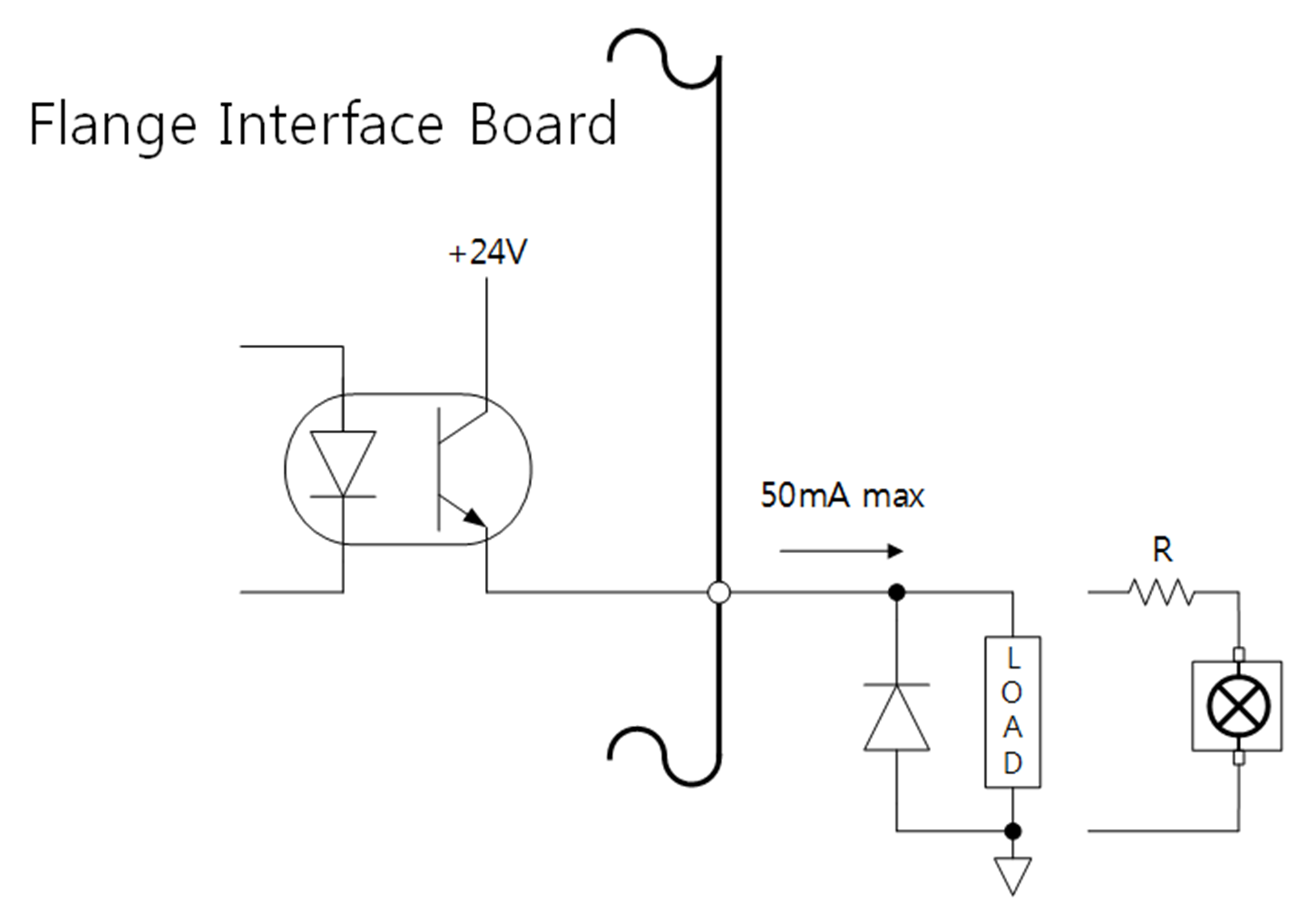
Especificaciones de salida digital de brida
La salida digital de brida es una especificación PNP, y la salida de acoplador de fotos se configura en la salida.
El canal de salida correspondiente se convierte en +24V cuando se activa la salida digital. Cuando la salida digital está desactivada, el estado del canal de salida correspondiente está abierto (flotante).
Las especificaciones eléctricas de la salida digital son las siguientes:
Parámetro | Min | Tipo | Max | Unidad |
|---|---|---|---|---|
Voltaje al conducir 10mA | 23 | - | - | V |
Voltaje al conducir 50mA | 22,8 | - | 23,7 | V |
Actual al conducir | 0 | - | 50 | MA |
La configuración se ha cambiado de la siguiente manera desde el 11 de abril de 2024
Las salidas digitales Ou admiten dos modos diferentes:
Modo | Activo | Inactivo |
|---|---|---|
PNP (Tipo de fuente, por defecto) | Alto | Abierto |
NPN (tipo de sumidero) | Bajo | Abierto |
La potencia inicial de entrada/salida (E/S) de la brida se ajusta a 24V y se puede ajustar a 0V o 12V.
El canal de salida correspondiente se convierte en ++12V o ++24V cuando se activa la salida digital.
Cuando la salida digital está desactivada, el estado del canal de salida correspondiente está abierto (flotante).
Las especificaciones eléctricas de la salida digital son las siguientes:
Parámetro | Min | Tipo | Max | Unidad |
|---|---|---|---|---|
Voltaje al conducir el modo 12V | 11.4 | 12 | 12.6 | V |
Voltaje al conducir el modo 24V | 22.8 | 24 | 25.2 | V |
Actual al conducir | 0 | - | 50 | MA |
Precaución
La salida digital no está sujeta a la limitación actual. Ignorar las especificaciones presentadas anteriormente durante el funcionamiento puede causar daños permanentes al producto.
La figura a continuación es un ejemplo de una configuración de salida digital, así que refiérase a ella mientras conecta la herramienta y el agarre.
Asegúrese de desconectar la energía del robot al configurar el circuito.
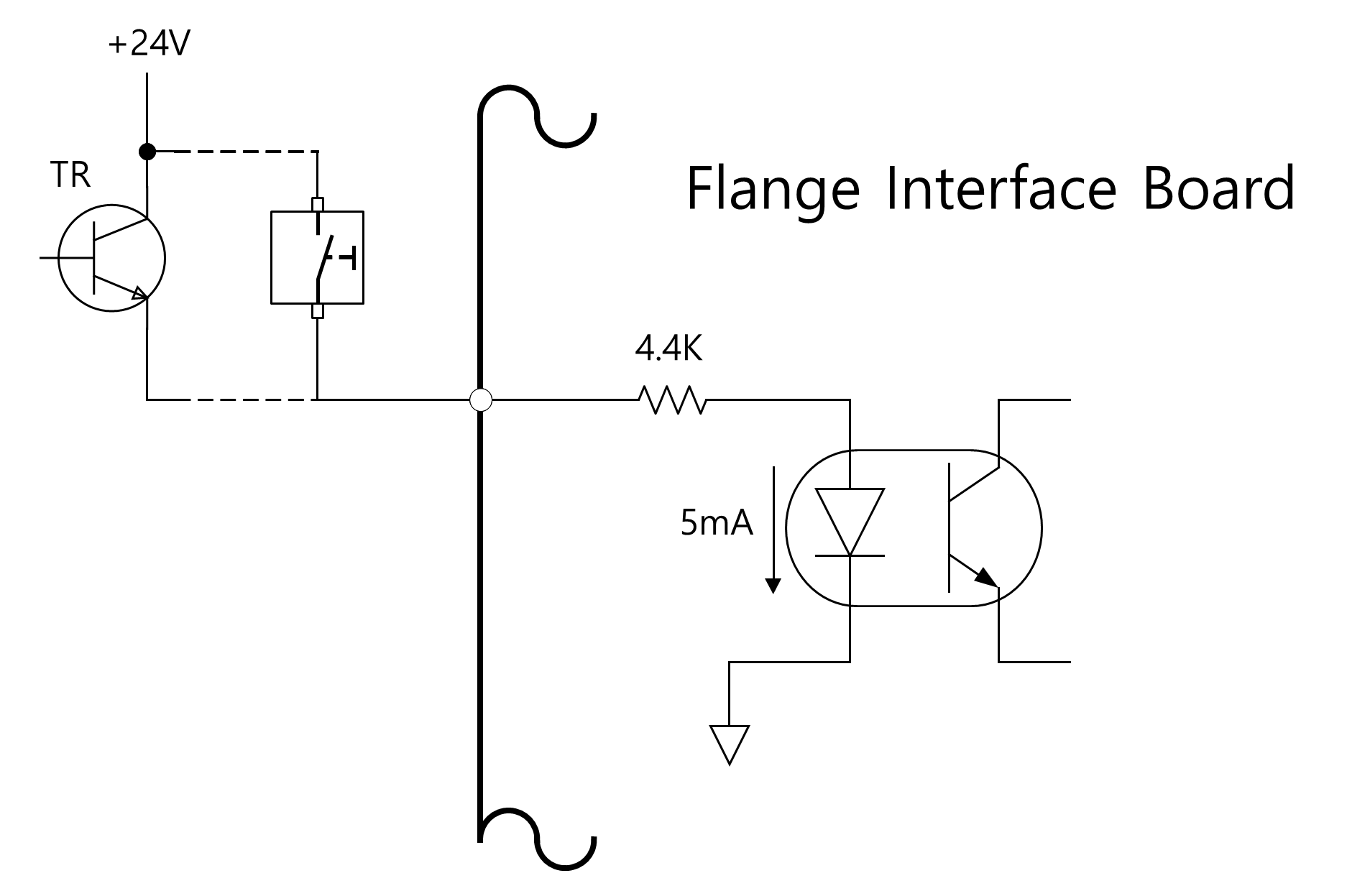
Brida Digital Input Especificaciones
La entrada digital de brida cuenta con una entrada de acoplador de fotos.
La corriente basada en la entrada de 24V está limitada a 5mA por resistencia interna.
Las especificaciones eléctricas de la entrada digital son las siguientes:
Parámetro | Min | Tipo | Max | Unidad |
|---|---|---|---|---|
Voltaje de entrada | 0 | - | 26 | V |
Lógico alto | 4.4 | - | - | V |
Lógico bajo | 0 | - | 0,7 | V |
Resistencia de entrada | - | 4.4k | - | Ω |
Precaución
La siguiente figura es un ejemplo de una configuración de entrada digital, así que refiérase a ella mientras conecta un dispositivo de entrada.
Asegúrese de desconectar la energía del robot al configurar el circuito.
Brida Analog Input Especificaciones
Recibe señales de voltaje o corriente de dispositivos externos.
La entrada analógica se puede ajustar a voltaje (0-10V) o corriente (4-20mA).
Las especificaciones eléctricas se muestran a continuación.
Parámetro | Min | Tipo | Max | Unidad |
|---|---|---|---|---|
Voltaje de entrada en modo de voltaje | 0 | - | 10 | V |
Entrada de corriente en modo actual | 4 | - | 20 | MA |
Resolución | - | 12 | - | poco |