¿Qué es un robot?
Límites funcionales de cada serie de robots
Las diferentes series de robots (A, AS, E, M/H, P Series) limitan el uso de funciones de la siguiente manera:
Basado en la actualidad: Se utiliza la corriente del motor localizado en cada articulación.
Basado en FTS: Se utiliza un FTS (sensor de torque de fuerza) situado en el extremo del robot.
Basado en JTS: Se utiliza JTS (sensores de torque de articulación) ubicados en cada junta.
Características | Serie A/E (basada en la corriente) | Serie As (actual, basado en FTS) | Serie M (basada en JTS) | Serie H (basado en JTS) | Serie P (basado en JTS) |
|---|---|---|---|---|---|
Enseñanza directa
| O | O (basado en la corriente) | O | O | O |
Enseñanza directa
| X | O (basado en FTS) | O | O | O |
Detección de colisiones | O | O (basado en la corriente) | O | O | O |
Instalación Medición de Posición | X | O (basado en FTS) | O | X (el robot solo se puede instalar en el suelo) | X (el robot solo se puede instalar en el suelo) |
Medición del peso de la herramienta | X | O (basado en FTS) | O | O | O |
Medición del peso de la pieza de trabajo | X | O (basado en FTS) | O | O | O |
Función nudge | X | X | O | O | O |
Control de la Fuerza | O (configuración disponible solo en tres direcciones de traducción, excluyendo la rotación) | O (basado en FTS) | O | O | O |
Control de cumplimiento | O (configuración disponible solo en tres direcciones de traducción, excluyendo la rotación) | O (basado en FTS) | O | O | O |
Límites funcionales de la supervisión de la fuerza para cada serie de robots
El control manual de programación y DART-Studio se pueden utilizar para supervisar los datos de fuerza. El comando DRL (check_force_condition()) también se puede usar para monitorear externamente datos de fuerza.
Si el modo de paletizado está configurado en “ON”: Las mismas funciones de control/monitoreo proporcionadas en el estado OFF están disponibles, excepto para los robots H, P Series.
Características | Serie A/E (basada en la corriente) | Serie As (basado en corriente y basado en FTS) | Serie M (basada en JTS) | Serie H (basado en JTS) | Serie P (basado en JTS) |
|---|---|---|---|---|---|
Control de la fuerza | O (configuración disponible solo en tres direcciones de traducción, excluyendo la rotación) | O (basado en FTS) | O | O | O |
O (Si el modo de paletización está configurado en “ON”: Salida de control de fuerza limitada (Base Rx, orientación Ry) 1)) | O (Si el modo de paletización está configurado en “ON”: Salida de control de fuerza limitada (Base Rx, orientación Ry) 1)) | ||||
Control del cumplimiento | O (configuración disponible solo en tres direcciones de traducción, excluyendo la rotación) | O (basado en FTS) | O | O | O |
O (Si el modo de paletización está configurado en “ON”: Salida de control de cumplimiento limitada (Base Rx, orientación Ry) 1)) | O (Si el modo de paletización está configurado en “ON”: Salida de control de cumplimiento limitada (Base Rx, orientación Ry) 1)) | ||||
Vigilancia de la fuerza (Enseñar colgante) | X | O (basado en FTS) | O (valor de fuerza de “0” mostrado para la sección de singularidad) | O (valor de fuerza de “0” mostrado para la sección de singularidad) | O (valor de fuerza de “0” mostrado para la sección de singularidad) |
O (Si el modo de paletización está configurado en “ON”: 4-Grado de Libertad previsto para la base (x, y, z, rz)) | O (Si el modo de paletización está configurado en “ON”: 4-Grado de Libertad previsto para la base (x, y, z, rz)) | ||||
Vigilancia de la fuerza (DART-Studio) | O (valor de fuerza de “0” mostrado para la sección de singularidad) | O (basado en FTS) | O (valor de fuerza de “0” mostrado para la sección de singularidad) | O (valor de fuerza de “0” mostrado para la sección de singularidad) | O (valor de fuerza de “0” mostrado para la sección de singularidad) |
O (Si el modo de paletización está configurado en “ON”: 4-Grado de Libertad previsto para la base (x, y, z, rz)) | O (Si el modo de paletización está configurado en “ON”: 4-Grado de Libertad previsto para la base (x, y, z, rz)) | ||||
Vigilancia de la fuerza (Cuando se usan comandos DRL: | O (valor de fuerza de “0” mostrado para la sección de singularidad) | O (basado en FTS) | O (valor de fuerza de “0” mostrado para la sección de singularidad) | O (valor de fuerza de “0” mostrado para la sección de singularidad) | O (valor de fuerza de “0” mostrado para la sección de singularidad) |
O (Si el modo de paletización está configurado en “ON”: 4-Grado de Libertad previsto para la base (x, y, z, rz)) | O (Si el modo de paletización está configurado en “ON”: 4-Grado de Libertad previsto para la base (x, y, z, rz)) |
Límite de salida de control (Base Rx, orientación Ry): Los valores de control de fuerza o cumplimiento correspondientes a los valores de control de fuerza o cumplimiento correspondientes a la orientación Base Rx, Ry no son emitidos. Ingresar el valor de control de fuerza o cumplimiento del eje relevante (Base Rx, Ry) será ignorado como “0”.
Visión general de Singularidad
La singularidad en un robot de articulación múltiple se refiere a una posición (o punto en un robot de articulación múltiple se refiere a una posición (o punto) donde el robot tiene dificultad para calcular su siguiente postura durante el movimiento. Los robots de articulación múltiple calculan cada ángulo de articulación durante el movimiento basado en el extremo del robot.
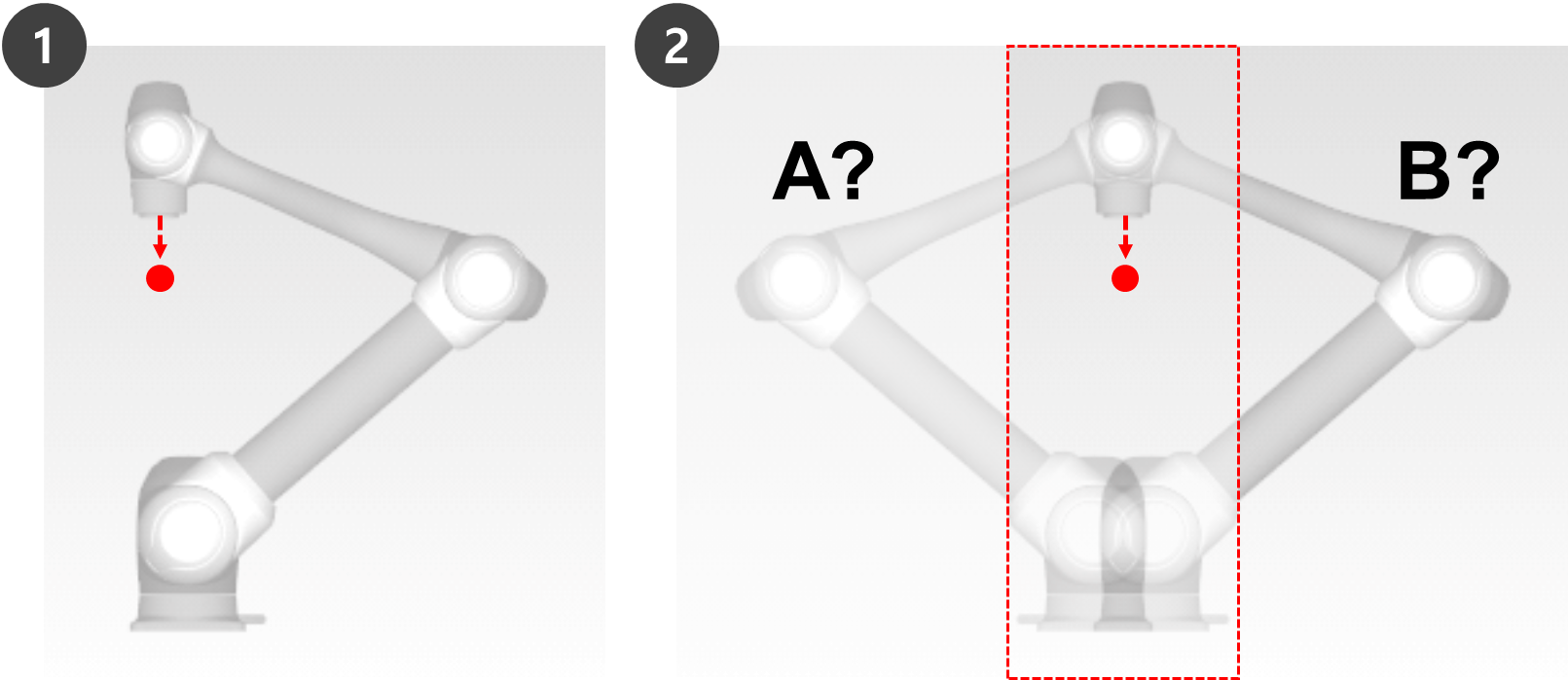
Por ejemplo, en la Fig. 1 A continuación, cuando el robot se está moviendo al punto rojo, el robot no podrá determinar si mover sus articulaciones para establecer la pose A o la pose B como se muestra en la Fig. 2. Esta posición (o punto) se llama la singularidad.
Cerca de una singularidad, el movimiento del robot no es fluido en términos de plano, punto y línea, el movimiento lineal del extremo del robot puede no mantenerse y el error de posición durante el control puede aumentar. La singularidad ocurre en 3 casos como se muestra en la siguiente figura, incluso cuando las articulaciones del robot forman una línea.
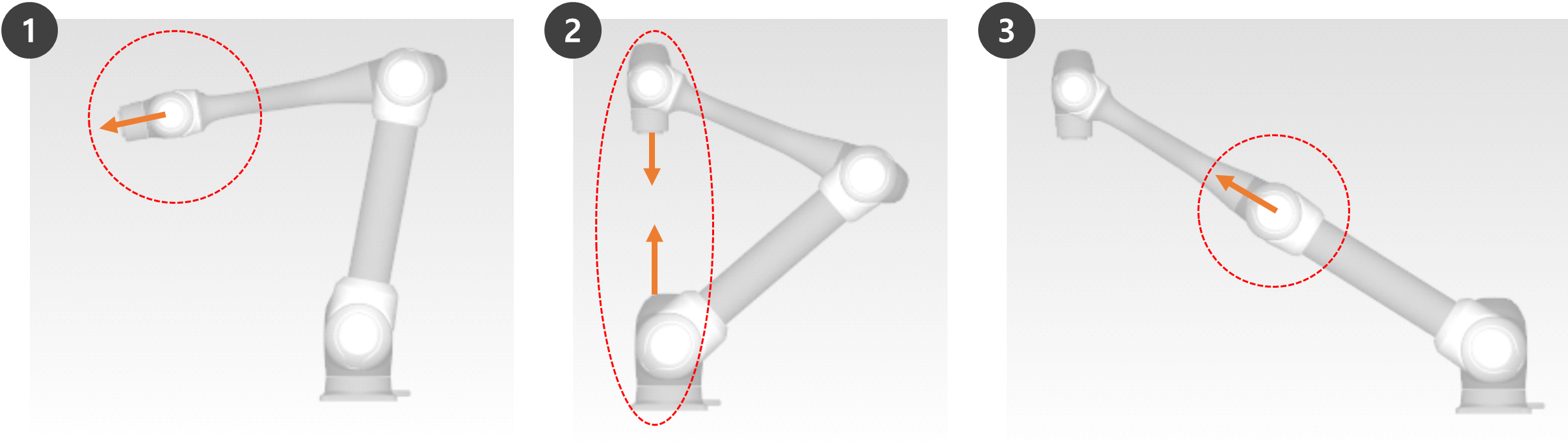
Wrist Singularidad: Cuando la muñeca del robot forma una línea cuando el eje 5 se acerca a 0º
Cuando se comparan con un brazo humano, los ejes 4, 5 y 6 corresponden a la articulación de la muñeca.
Shoulder Singularidad: Cuando los ejes 1 y 6 están en la misma línea
Cuando se comparan con un brazo humano, los ejes 1 y 2 corresponden a la articulación del hombro.
Elbow Singularidad: Cuando el robot forma una línea cuando el Eje 3 se acerca a 0º
Cuando se compara con un brazo humano, el eje 3 corresponde al codo.
Precaución
Las operaciones manuales y automáticas que se mueven con rotación conjunta no están influenciadas por la singularidad.
Movimiento de tareas, comando MoveL, etc.
La singularidad solo ocurre durante el funcionamiento manual y automático donde el robot termina realizando un movimiento lineal.
Movimiento conjunto, comandos del MoveJ, etc.
En la zona de singularidad, el control de fuerza o el control de cumplimiento no están disponibles.
A medida que la velocidad de rotación de ciertos ejes aumenta rápidamente cuando un movimiento lineal pasa una singularidad, es posible que ocurra una infracción del límite de velocidad conjunta o una infracción del límite del ángulo conjunto.
Cómo evitar la singularidad
Los robots Doosan Robotics ofrecen opciones para evitar singularidades durante el control de movimiento. Sin embargo, se recomienda configurar una tarea que no cree excepciones utilizando comandos de movimiento conjunto como MoveJ en zonas de singularidad.
Estas son las opciones de evitación de singularidad proporcionadas por Doosan Robot:
Evitación automática: Realiza movimiento evitando singularidades. Sin embargo, el movimiento del robot puede diferir de la ruta esperada.
Prioridad de ruta: Mantiene el camino y la velocidad, pero puede detenerse debido a un error cerca de una singularidad.
Velocidad variable: Mantiene el camino, pero desacelera cerca de una singularidad.
Descripción general de Euler Angle
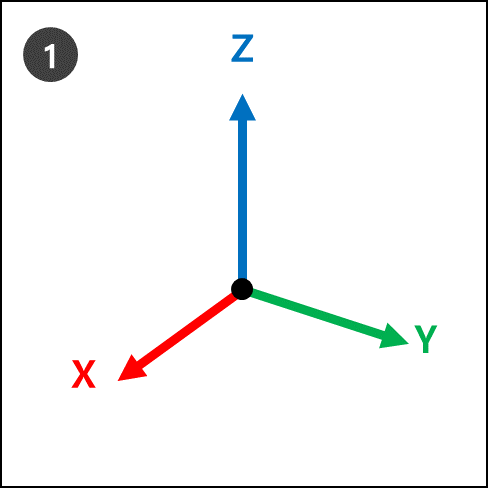
El ángulo de Euler es una forma de expresar los ángulos de los ejes X, Y y Z, que son perpendiculares entre ellos en la dirección del objeto. A, B y C se refieren a los ángulos de rotación secuencial. Cada fabricante de robots define este orden de rotación A, B y C de manera diferente, como RZ-Ry-RZ, RZ-Ry- Rx o Rx-Ry-Rz.
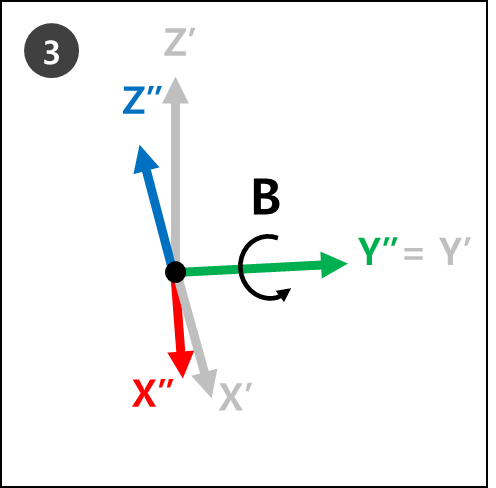
Por ejemplo, RZ-Ry-Rx. Aquí, RZ significa la rotación en el eje Z, Ry significa la rotación en el eje Y y Rx significa la rotación en el eje X. RZ se puede expresar como ángulo A, Ry como ángulo B, y Rx como ángulo C para indicar la dirección de rotación actual de un objeto. Tenga en cuenta que una vez que se realiza la rotación en dirección del eje Z desde las coordenadas, las rotaciones se harán en función de las nuevas coordenadas.
Esto se puede visualizar con los pasos 1 a 4.
 |
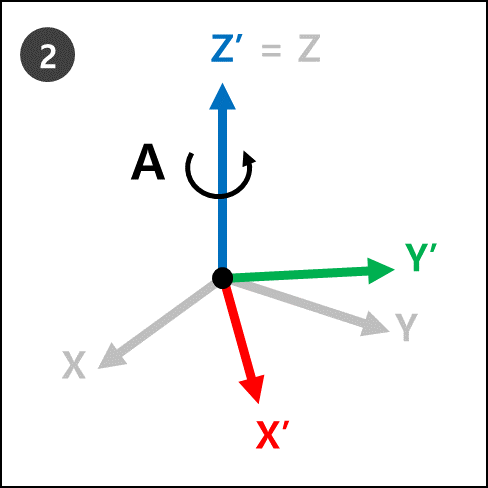 |
 |
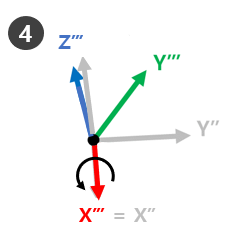 |
Las nuevas coordenadas (Z’’’, Y’’’, X’’’ del paso 4 se refieren a la rotación actual del robot cuando se aplican los ángulos A, B y C.
Esto se puede visualizar fácilmente con la mano derecha. Haz la siguiente pose con tu mano derecha. Esto se llama la regla de la mano derecha, y hacer que el pulgar (eje X), el dedo índice (eje Y) y el dedo medio (eje Z) sean perpendiculares entre sí creará coordenadas que consisten en ejes X, Y y Z.
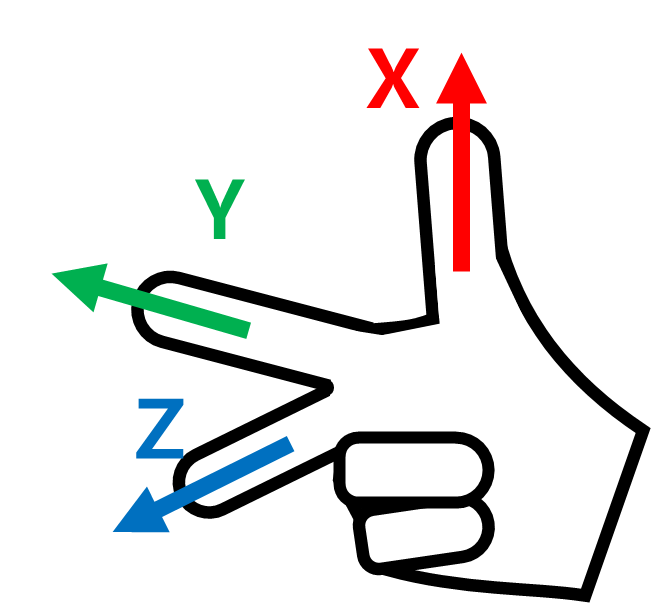
Luego haz la Regla Cartesiana Pose de la derecha y haz rotaciones RZ, Ry y Rx en orden secuencial.
Rz: Gire el dedo medio (eje Z) por Unos grados.
Ry: Gire el dedo índice (eje Y) por grados B.
Rx: Gire el pulgar (eje X) por C grados.
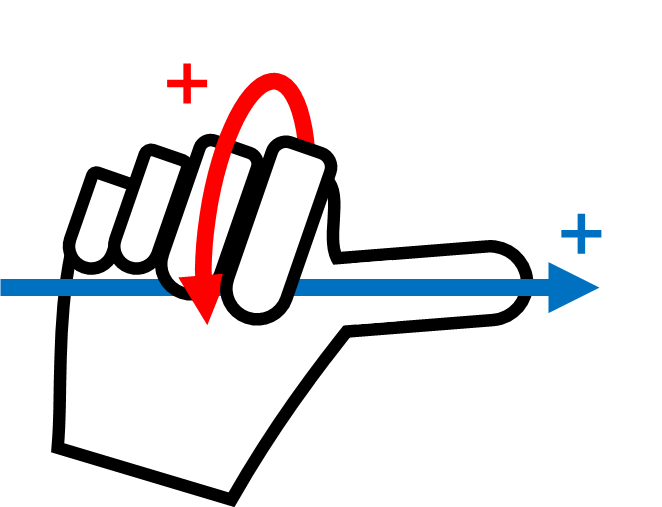
Nota
La dirección de rotación + de la dirección de rotación + de A, B y C es la dirección de cuatro dedos excepto el pulgar, cuando el pulgar apunta a la dirección + y los cuatro dedos están apretados. Esto se llama la Ley del Tornillo en el sentido de las agujas del reloj.