
CONTROLADOR DC (CS-12P)
Introducción del producto (CS-12P)
Nombre de cada parte y funciones
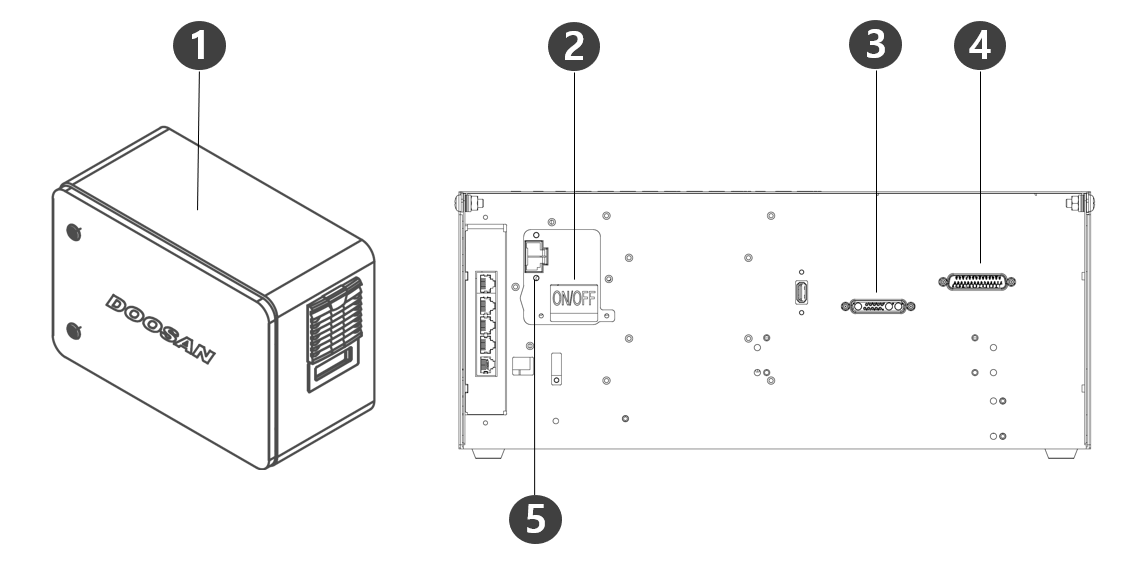
No. | Temas | Descripción |
1 | Terminal de conexión E/S (interno) | Se puede conectar con controladores o periféricos de otros robots. |
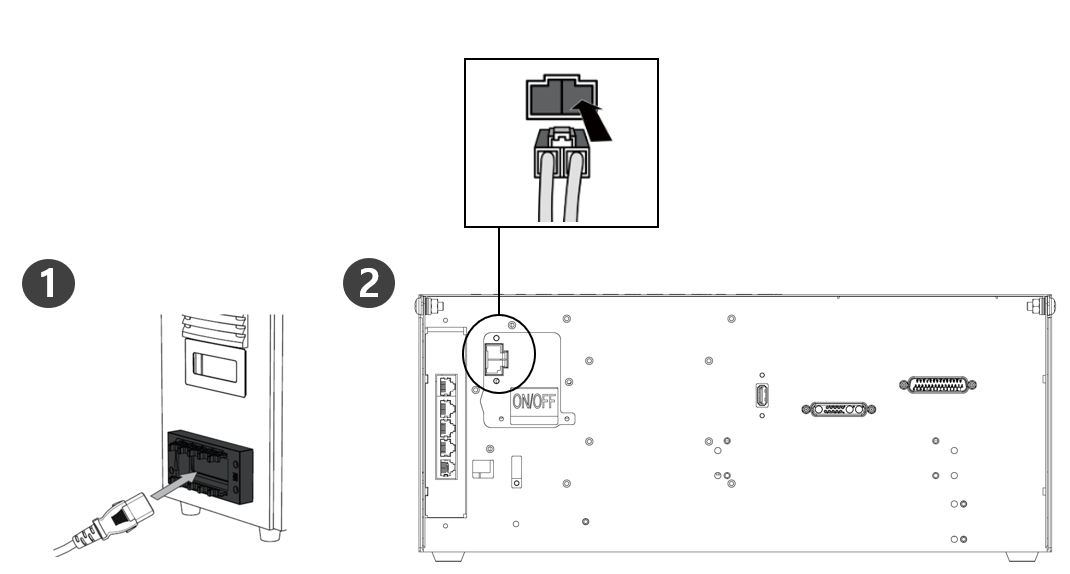
2 | Interruptor de encendido | Se utiliza para ENCENDER / apagar la potencia principal del controlador. |
3 | Enseñar terminal de conexión de cable colgante | Se utiliza para conectar el cable colgante de Teach al controlador. |
4 | terminal de conexión de cable robot | Se utiliza para conectar el cable del robot al controlador. |
5 | Terminal de conexión de energía | Utilizado para conectar la fuente de alimentación del controlador. |
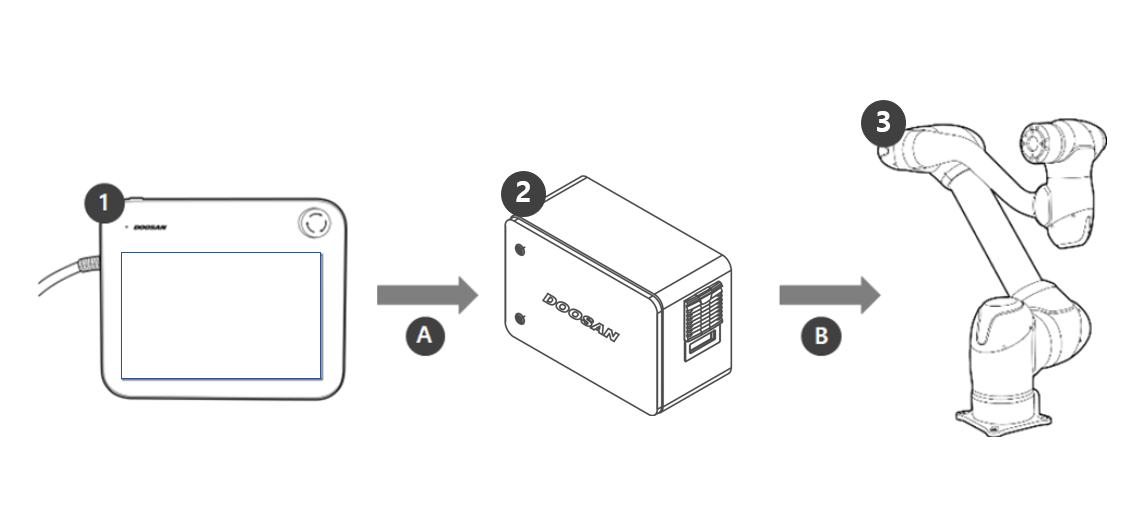
Configuración del sistema
No. | Nombre | Descripción |
|---|---|---|
1 | Enseñar colgante | Este dispositivo gestiona todo el sistema y es capaz de enseñar posturas específicas del robot o hacer ajustes relacionados con los manipuladores y controladores. |
2 | Controlador | Controla el movimiento del robot de acuerdo con la pose o movimiento establecido por el colgante Teach. Cuenta con varios puertos de E/S que permiten la conexión y el uso de diversos equipos y dispositivos. |
3 | Manipulador | Es un robot colaborativo industrial que puede realizar tareas de transporte o montaje con diversas herramientas. |
A | Mando/Supervisión | |
B | Fuente de alimentación/red |
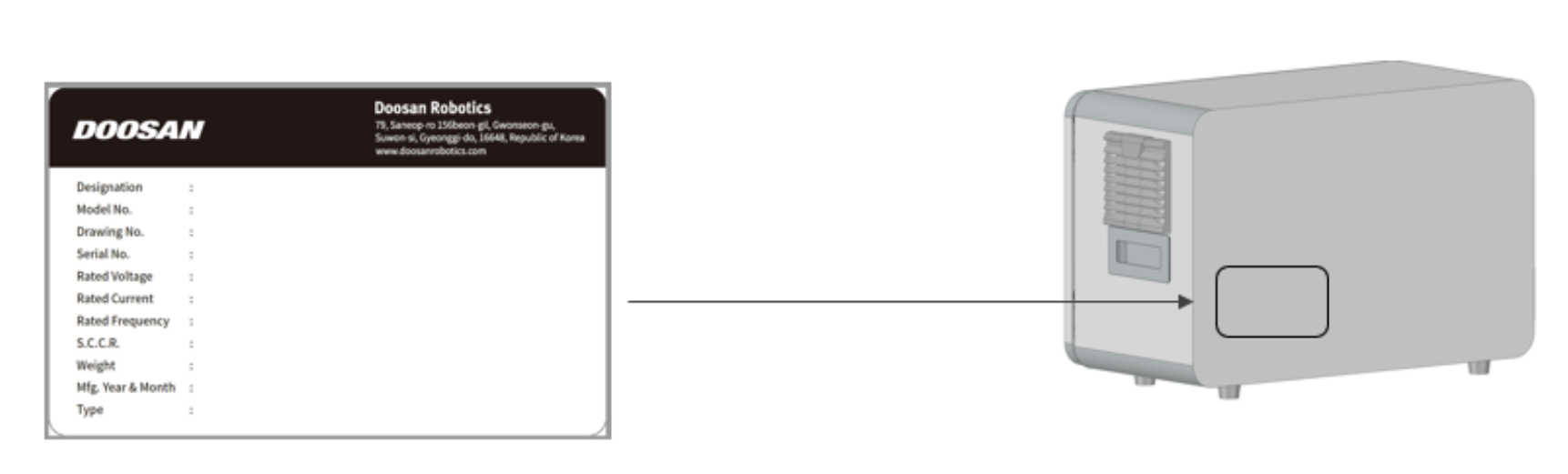
Placa de identificación y etiqueta
Instalación (CS-12P)
Precauciones durante la instalación
Precaución
Asegure suficiente espacio antes de instalar el controlador. Si no se asegura suficiente espacio, el controlador puede dañarse o el manipulador o el cable colgante Teach puede tener una escasez.
Compruebe la fuente de alimentación de entrada cuando conecte la energía al producto. Si la fuente de alimentación de entrada conectada es diferente de la entrada de alimentación nominal (22-60VDC), el producto no funciona correctamente o el controlador puede dañarse.
Entorno de instalación
Al instalar el controlador, considere lo siguiente.
Asegure suficiente espacio antes de instalar el controlador.
El controlador debe ser fijo.
Asegúrese de que ningún componente no esté fijo en el vehículo móvil.
Instalación de hardware
Instale el robot, el controlador y el colgante de enseñar, los componentes clave del sistema, y suministre energía a ellos antes de operar el manipulador. La instrucción para instalar cada elemento es la siguiente:
Conexión del Manipulador al Controller
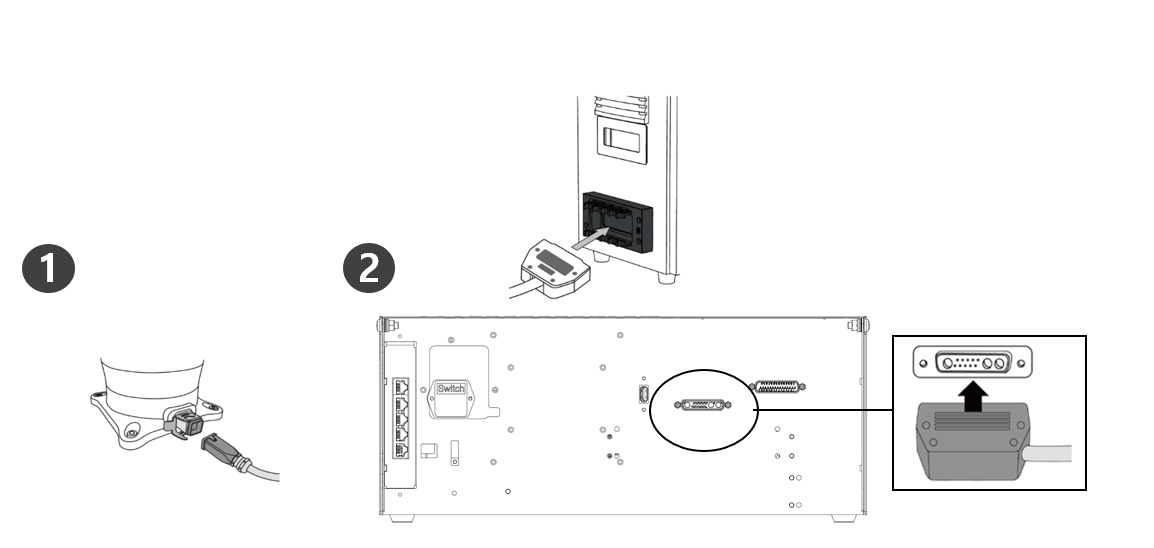
Descripción | |
|---|---|
1 | Conecte el cable del manipulador al controlador, coloque un anillo de sujeción
|
2 | Conexión del extremo opuesto del cable de conexión del manipulador al controlador
|
Precaución
No desconecte el cable del manipulador mientras el robot está encendido. Esto puede hacer que el robot funcione mal.
No intente modificar o extender el cable del manipulador.
Cuando instale el controlador en el suelo, asegure al menos 50 mm de espacio libre en cada lado para asegurar una ventilación adecuada.
Asegúrese de bloquear correctamente los conectores antes de encender el controlador.
Nota
Al configurar el sistema, se recomienda instalar un reductor de ruido para evitar efectos de ruido y mal funcionamiento del sistema.
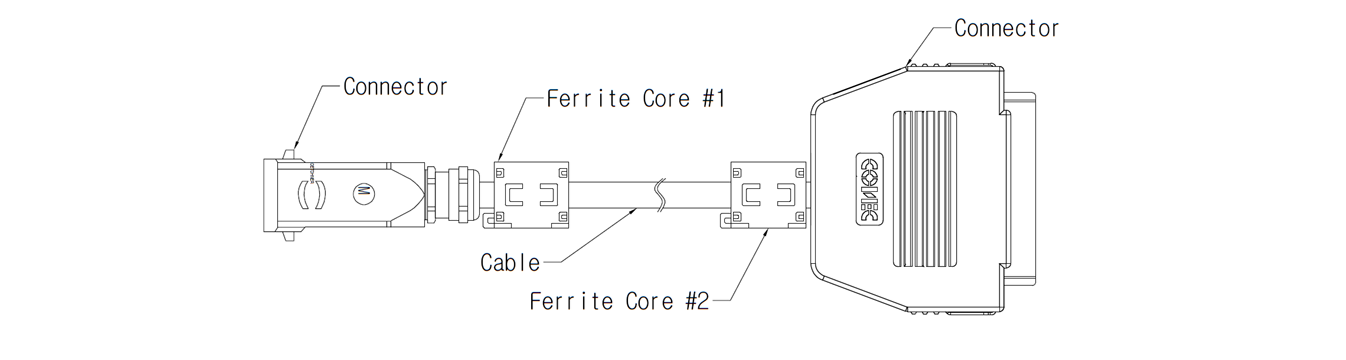
Si el controlador está influenciado por el ruido generado por ondas electromagnéticas, es necesario instalar un núcleo de ferrita para garantizar el funcionamiento normal. La ubicación de instalación es la siguiente:
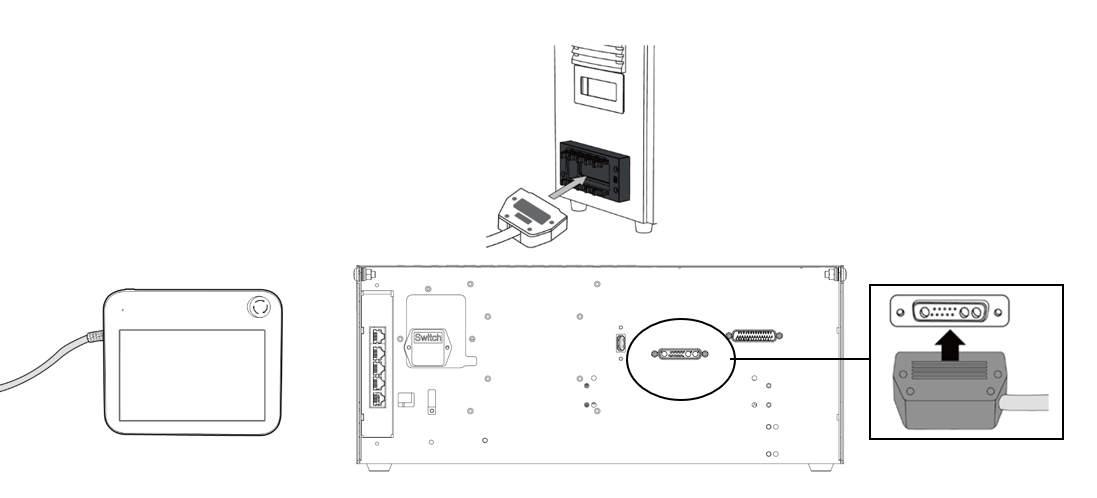
Conecte el controlador para enseñar colgante
Conecte el cable colgante de Teach a las conexiones correspondientes en el controlador hasta que haga clic y asegúrese de que el cable esté enchufado firmemente.
Precaución
Cuando conecte el cable, compruebe la forma de la conexión antes de conectarlo para que el pasador no se dobla.
Si el colgante Teach se utiliza colgando en el vehículo móvil o en el controlador, tenga cuidado de no tropezar con los cables de conexión.
Tenga cuidado de no permitir que el controlador, enseñe al colgante y al cable a entrar en contacto con el agua.
No instale el controlador y enseñe colgante en un ambiente polvoriento o húmedo.
Los controladores y el colgante inteligente nunca deben exponerse a un entorno de polvo por encima del grado IP20. Tenga especial cuidado en ambientes con polvo conductor.
Nota
Al configurar el sistema, se recomienda instalar un reductor de ruido para evitar efectos de ruido y mal funcionamiento del sistema.
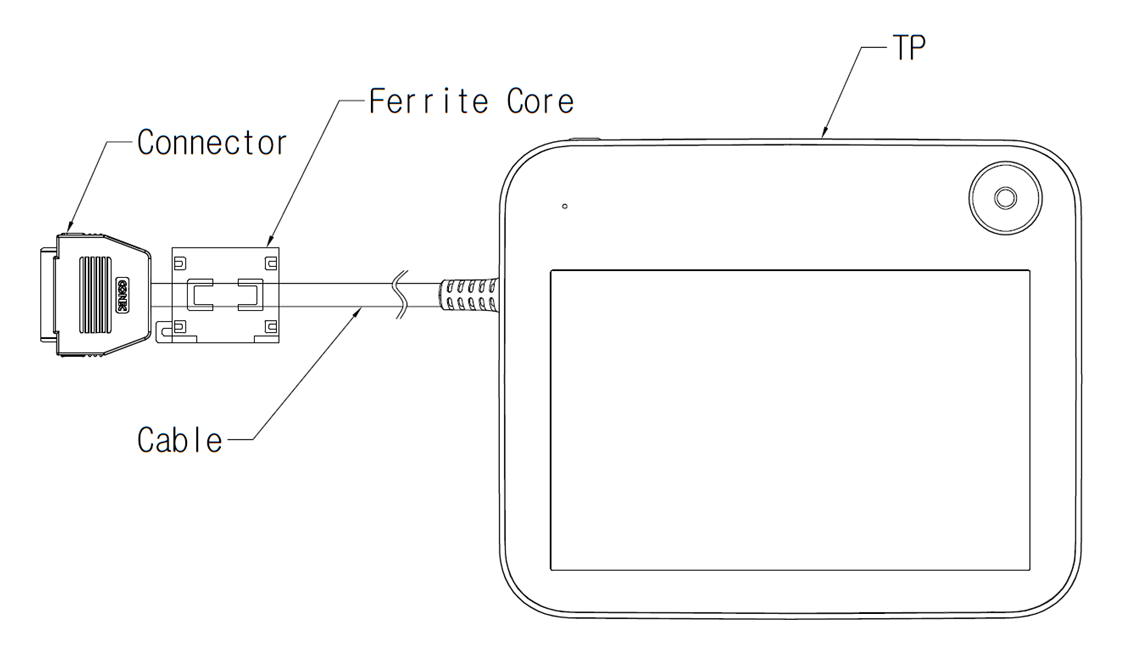
Si el colgante Teach está influenciado por el ruido generado por las ondas electromagnéticas, es necesario instalar un núcleo de ferrita para garantizar un funcionamiento normal. La ubicación de instalación es la siguiente:
Colocación del cable del manipulador y enseñar el cable colgante
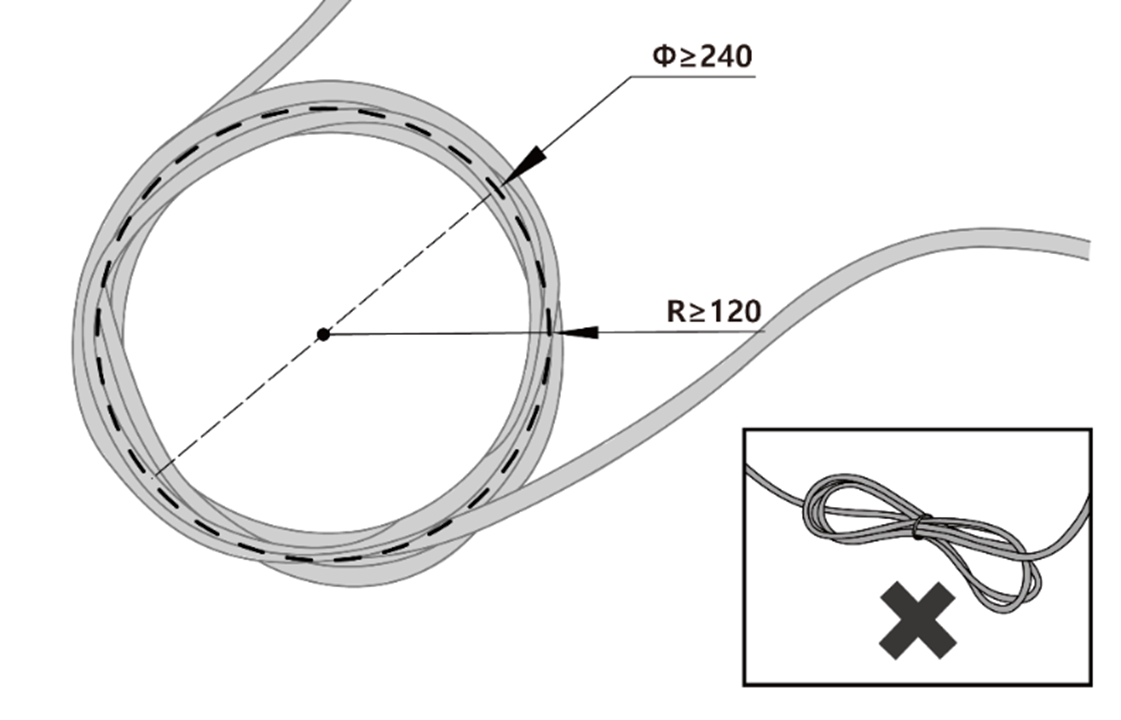
Asegúrese de que el radio de curvatura del cable colgante y del manipulador sea mayor que el radio de curvatura mínimo (120 mm).
Precaución
Asegúrese de que el radio de curvatura entre el cable colgante Teach y el conector colgante Teach sea mayor que el radio de curvatura mínimo (120 mm).
Si el radio de curvatura es menor que el radio de curvatura mínimo (120 mm), puede producirse una desconexión del cable o daños en el producto.
En entornos donde puede producirse ruido electromagnético, se debe realizar una instalación adecuada del cable para evitar fallos de funcionamiento.
Conexión de energía al controlador
Conecte el cable de alimentación a las conexiones correspondientes en el controlador hasta que haga clic y asegúrese de que el cable esté enchufado firmemente.
Advertencia
Asegúrese de que el robot esté correctamente conectado a tierra después de conectar los cables de alimentación (Conexiones a tierra eléctricas). Establezca un terreno común para todos los equipos del sistema con pernos no utilizados relacionados con el símbolo de tierra dentro del controlador. El conductor de tierra debe satisfacer la clasificación de corriente máxima del sistema.
Proteja la potencia de entrada del controlador utilizando dispositivos como un disyuntor.
No modifique ni extienda el cable del robot. Puede causar incendio o avería del controlador.
Asegúrese de que todos los cables estén conectados correctamente antes de suministrar energía al controlador. Utilice siempre el cable original incluido en el paquete del producto.
Tenga cuidado de no conectar la polaridad del voltaje de entrada incorrectamente.
Nota
Al configurar el sistema, se recomienda instalar un interruptor de alimentación capaz de apagar todos los dispositivos a la vez.
Cuando se utiliza un controlador para DC, el movimiento del robot puede ser limitado dependiendo de la carga y el movimiento.
Si el voltaje de entrada es inferior a 48V, el movimiento del robot puede ser limitado según la carga y el movimiento.
La fuente de alimentación debe cumplir requisitos mínimos, como los disyuntores a tierra y los interruptores. Las especificaciones eléctricas son las siguientes:
Parámetro | Especificaciones |
Voltaje de entrada | 22 – 60 VDC |
Corriente de entrada clasificada | 30A |