
Panel de Alineación
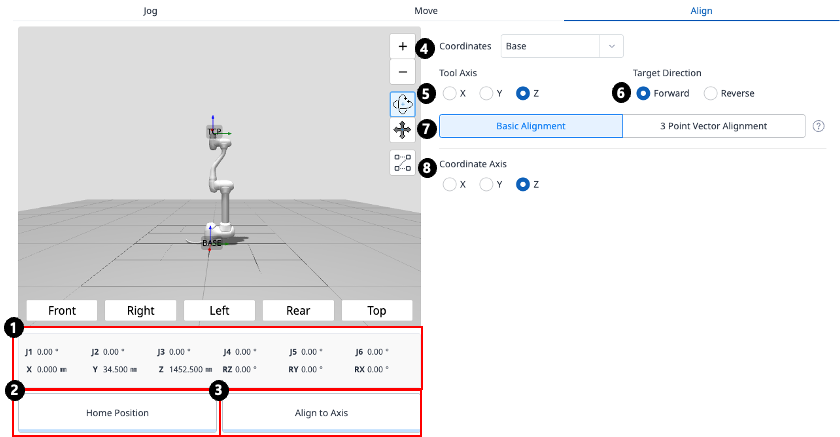
Menú
Temas | Descripción | |
|---|---|---|
1 | Postura de robot | Muestra la postura conjunta del robot actual y la postura de la tarea. |
2 | Botón de posición de inicio | Mueve el robot a la posición de inicio cuando se hace clic. |
3 | Botón de alinear | Alinea el robot cuando se hace clic. |
4 | Seleccione Sistema de coordenadas de referencia | Seleccione el sistema de coordenadas de referencia para el posicionamiento. |
5 | Eje de herramientas | Seleccione qué eje del TCP alinear. |
6 | Dirección del objetivo | Seleccione la dirección con la que alinear el TCP. |
7 | Método de alineación | Seleccione el método de alineación. |
8 | Eje de coordenadas | Seleccione con qué eje del sistema de coordenadas de referencia alinearse. |
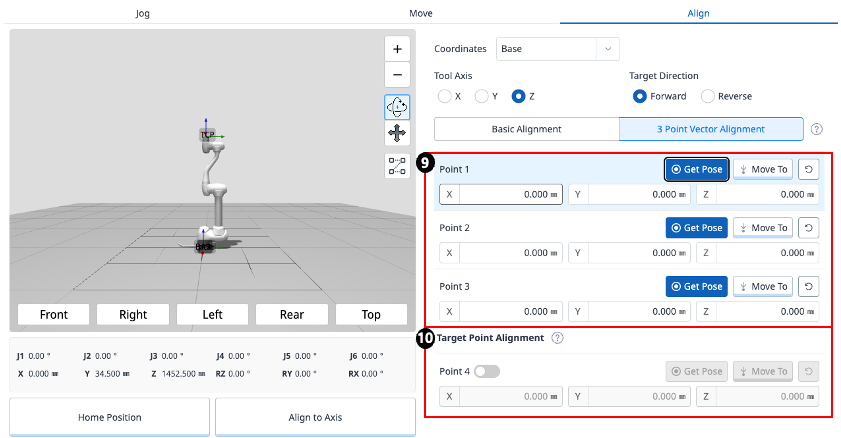
9 | Seleccione puntos en un avión | Seleccione tres puntos que definan el plano. 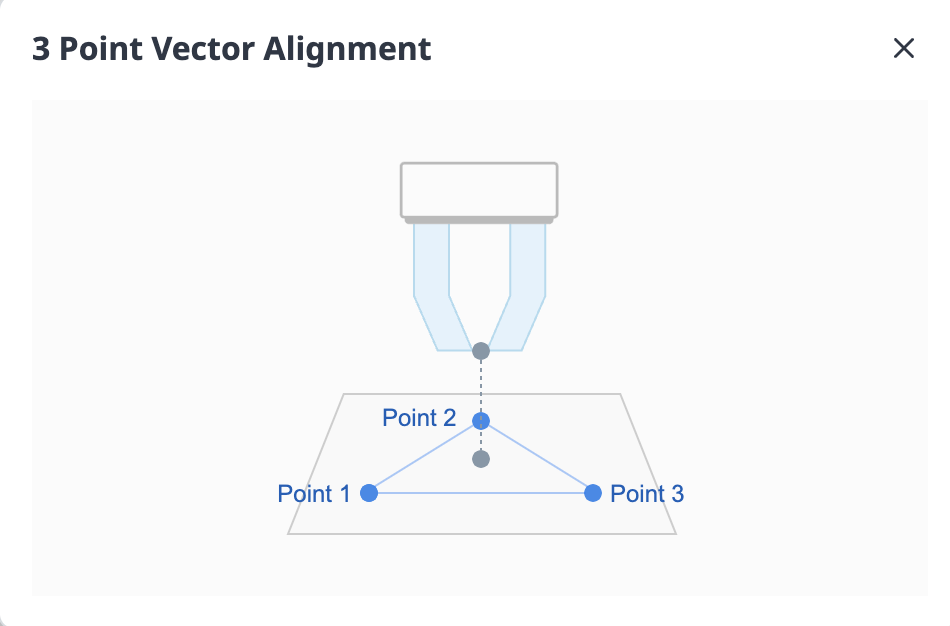 |
10 | Alineación de los puntos de destino | Seleccione un punto para posicionar el TCP. |