Puesta en marcha inicial
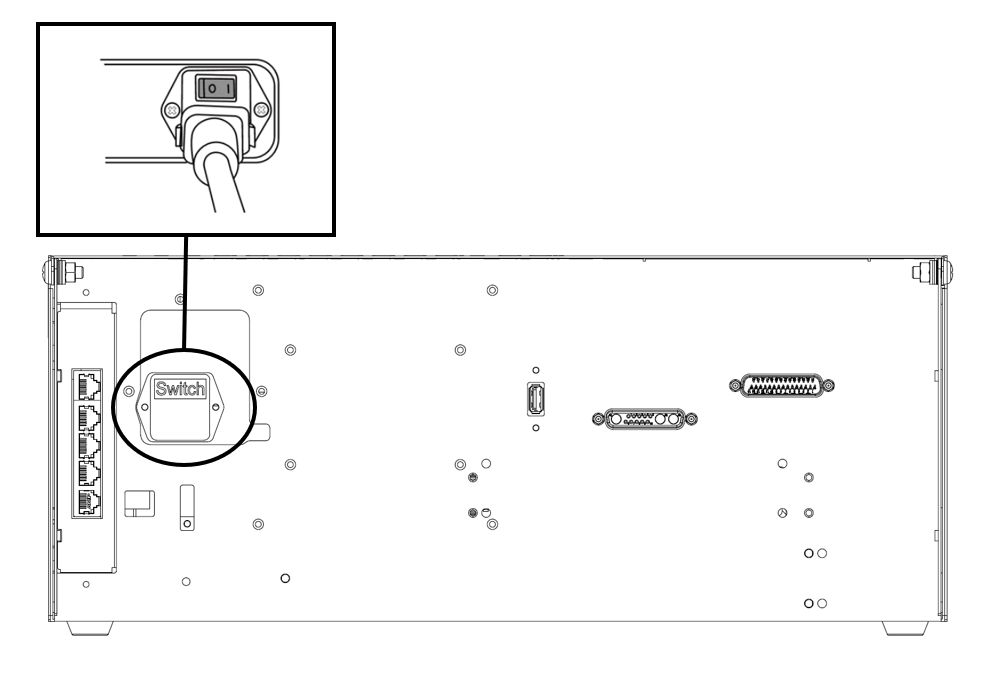
Poder en el controlador
OBLIGATORIO FÁCIL 1 MIN
Presione el interruptor de encendido en la parte inferior del controlador. La potencia para sistemas como el robot, el controlador y el colgante de Teach está encendido.
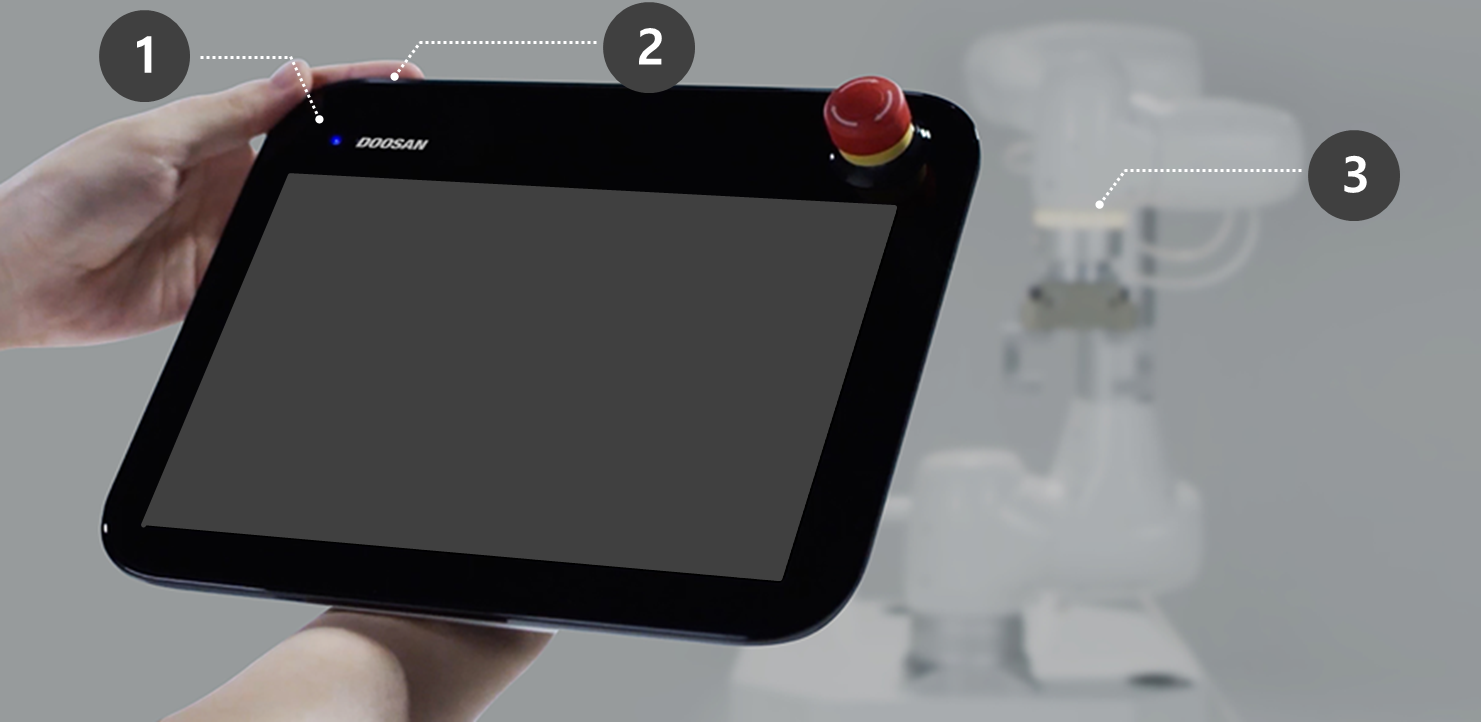
Mantenga presionado el botón de encendido (Fig. 2) hasta que la pantalla colgante Teach encienda el led colgante Teach (Fig. 1) y el led de brida (Fig. 3) parpadearán en rojo hasta que el controlador del robot se conecte a la red.
ㅤ
ㅤ
Para obtener más información acerca de equipos que no sean el colgante Teach, consulte Encienda/apague el sistema.
Nota
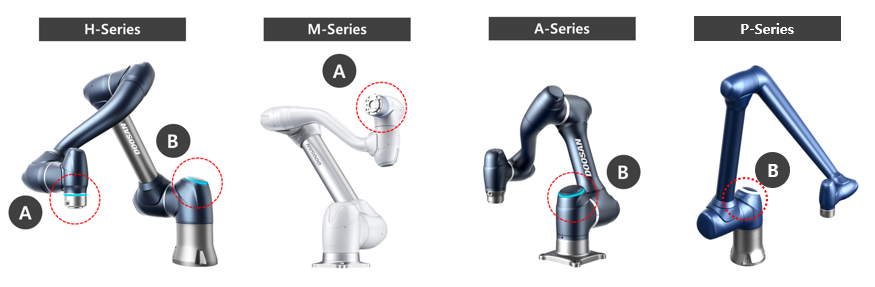
Las posiciones LED DE cada serie de robots Doosan Robotics son las siguientes:
A: Brida led
B: Eje 1 led
Desenganche el botón de parada de emergencia
OBLIGATORIO FÁCIL 1 MIN
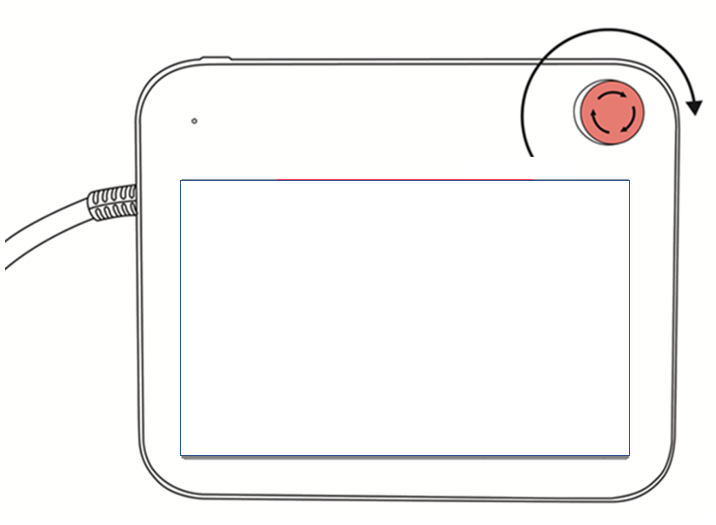
Después de la instalación del robot y después del arranque inicial del sistema, se muestra una ventana emergente de advertencia mientras se presiona el botón de parada de emergencia del colgante de enseñanza. El botón de parada de emergencia debe desengancharse para poder operar el robot.
Gire el botón de parada de emergencia en el sentido de las agujas del reloj para desactivar el estado de parada de emergencia.
Desenganche la posición de embalaje
OBLIGATORIO FÁCIL 3 MIN
El robot está en su pose de embalaje para permitir un fácil transporte o embalaje. Para usar el robot, es necesario desenganchar la pose del embalaje. Como el robot mantiene una pose que excede el límite de ángulo de articulación cuando está en pose de embalaje, es imposible establecer el estado de Servo On debido a la violación del límite de seguridad. El robot led está iluminado rojo en este estado.
Nota
Si hay un caso en el que necesite empaquetar el robot debido a la reubicación, establezca la pose del paquete utilizando Move con pose de empaquetado en el modo de empaquetado.
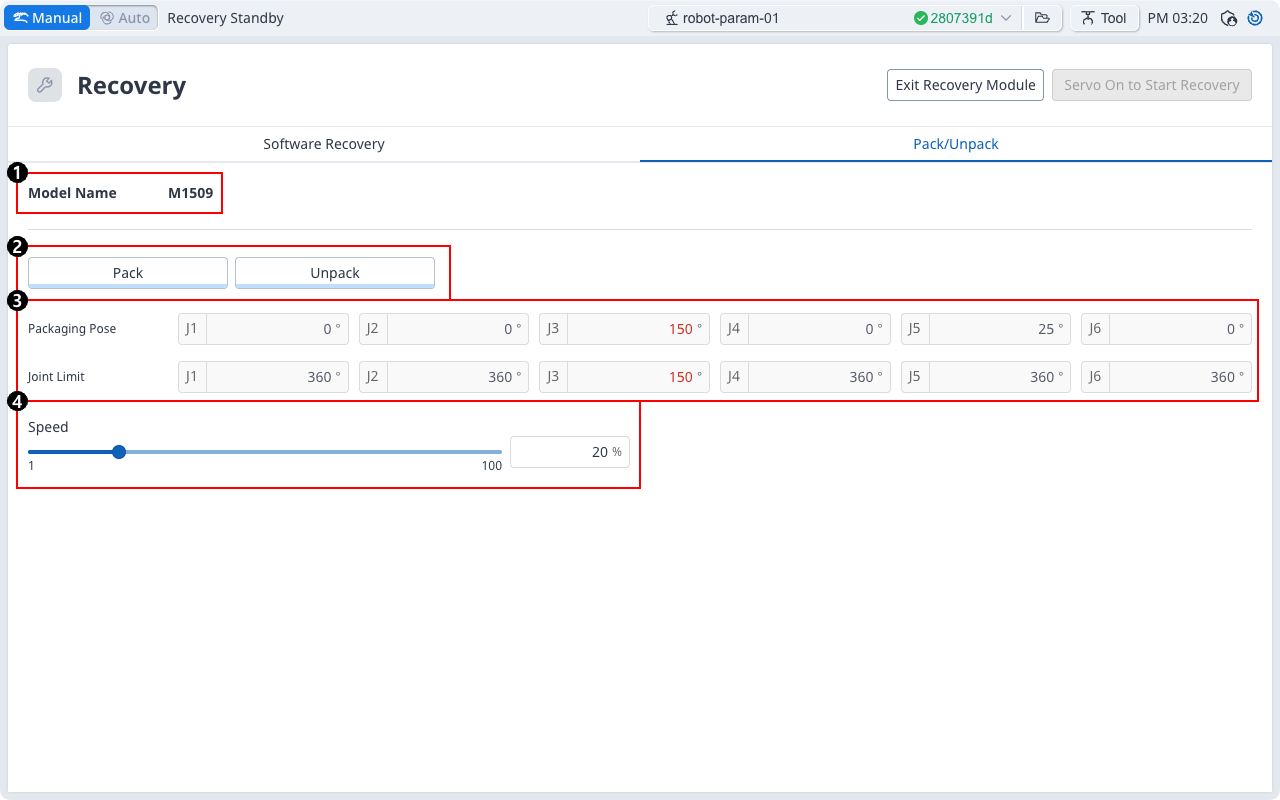
Temas | Descripción | |
|---|---|---|
| 1 | Nombre del modelo | Aparece el nombre del modelo de robot conectado. |
| 2 | Empacar/desempacar | Se puede seleccionar Pack o Unpack. |
| 3 | Posición de embalaje/límite de la junta | Aparecen los valores límite pose y joint. |
| 4 | Relación de velocidad | La velocidad del modo pack o unpack se puede ajustar a través de un deslizador o entrada. |
El proceso de configuración de la postura de embalaje es el siguiente:
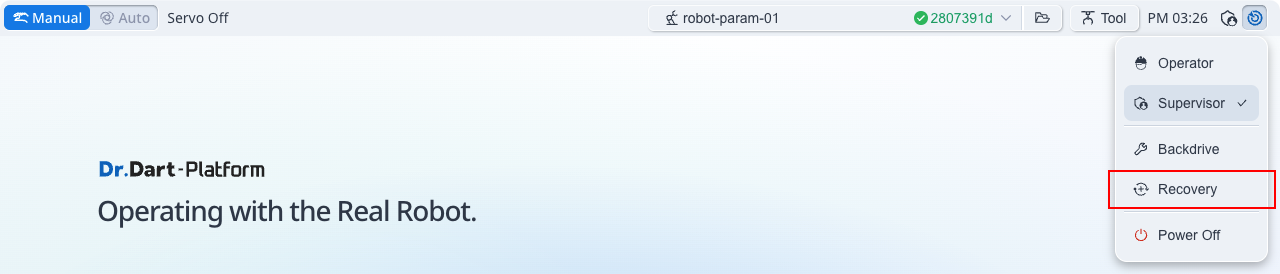
Toque el menú Recovery en el panel de encabezado.
Seleccione la pestaña Modo de empaquetado.

Toque el botón Servo On to Start Recovery para habilitar el modo de empaquetado.

El robot se mueve automáticamente a la pose de embalaje establecida.
El botón Pack le permite poner el robot en la posición Pack y el botón Unpack le permite poner el robot en la posición Home predeterminada.
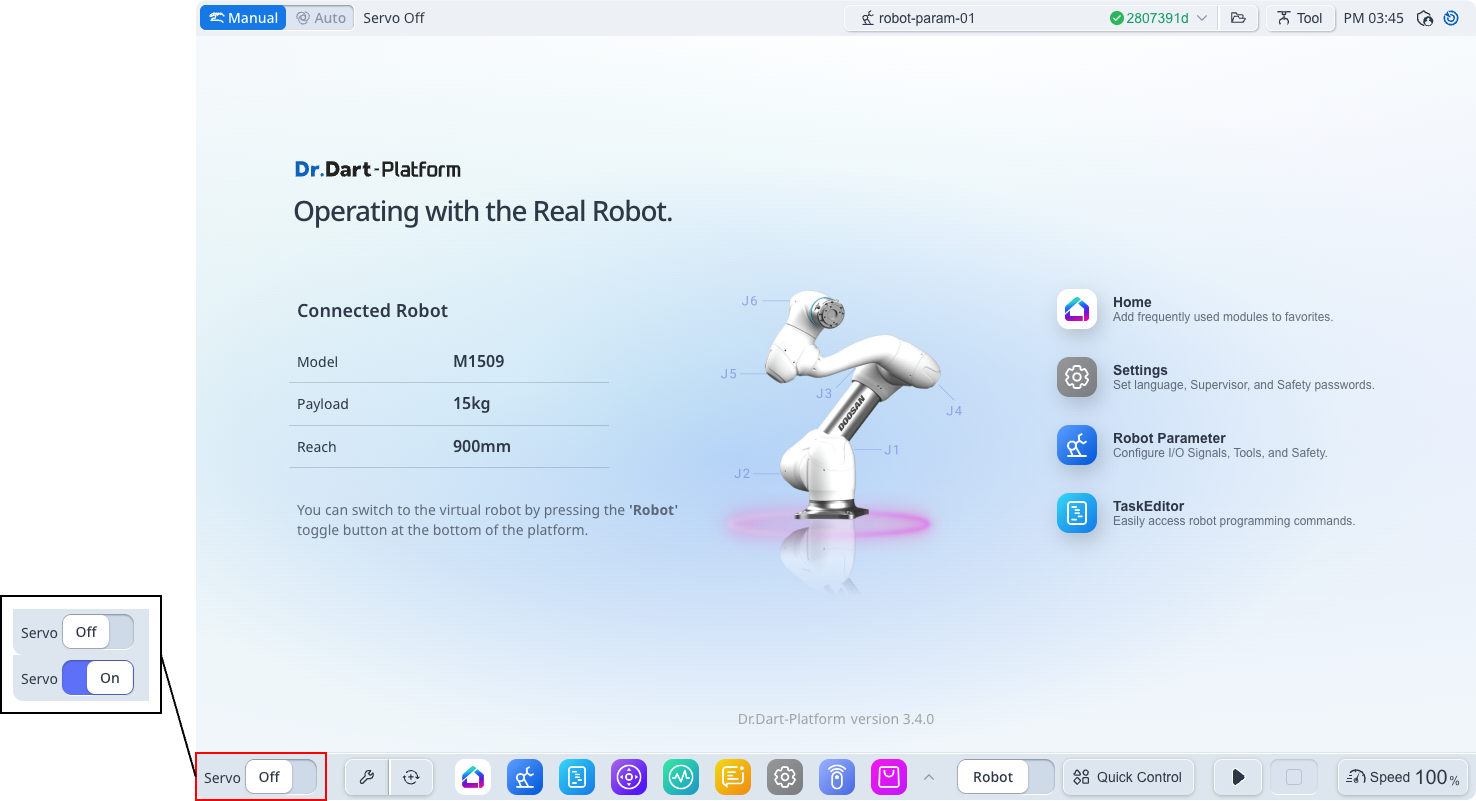
Servo apagado
OBLIGATORIO FÁCIL 1 MIN
Servo On status es el estado en el que el robot está listo con alimentación suministrada a las juntas del robot para modificar la postura del robot.
Presione el botón Servo Off para cortar la energía suministrada a las juntas del robot y detener el robot. Para obtener más información, consulte Descripción general de Servo On.