
Especificaciones del robot
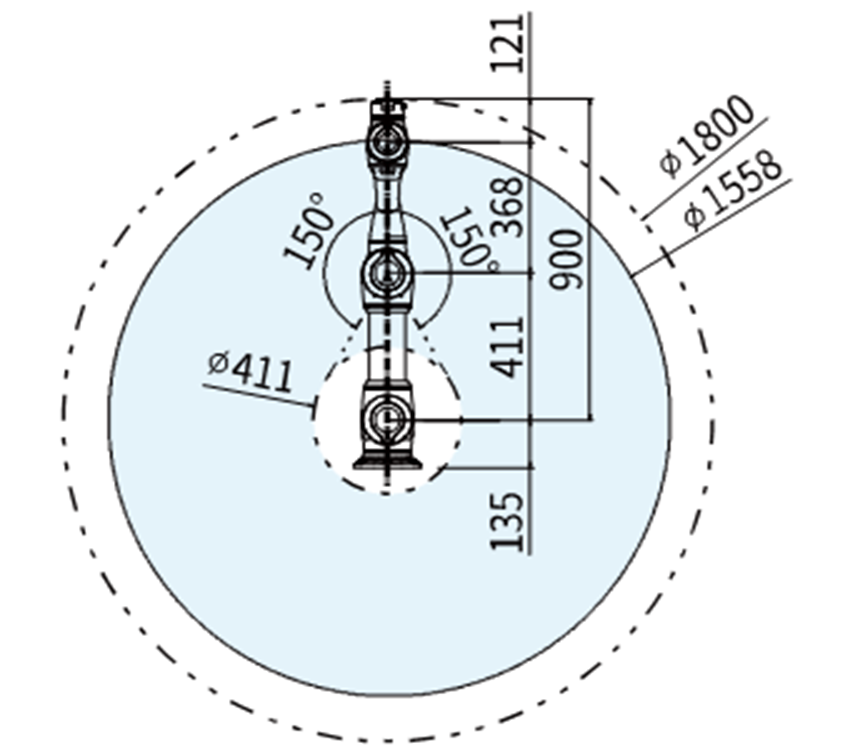
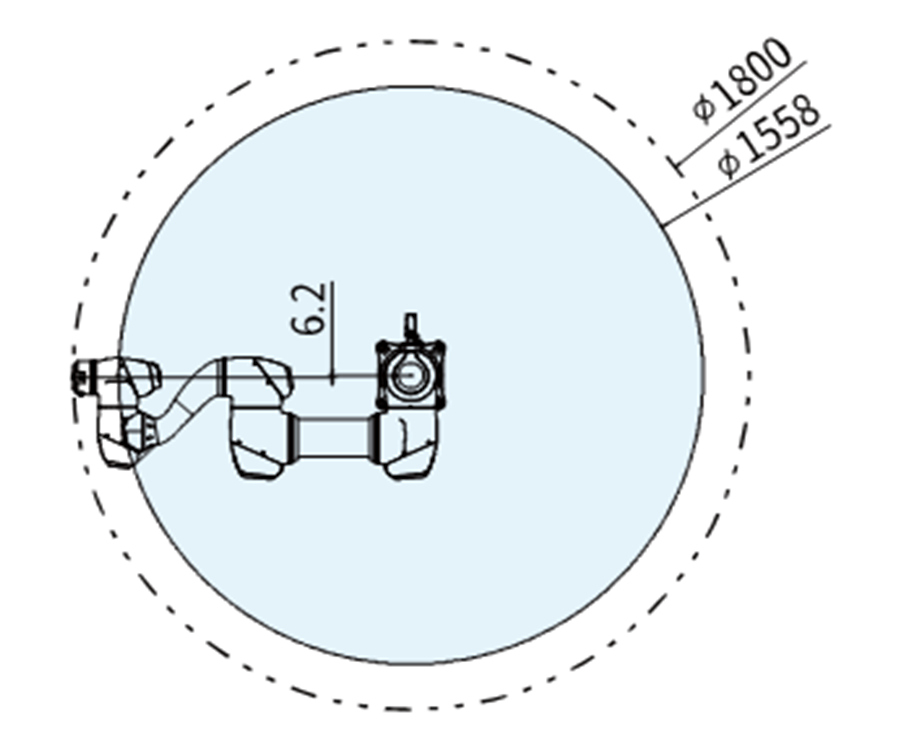
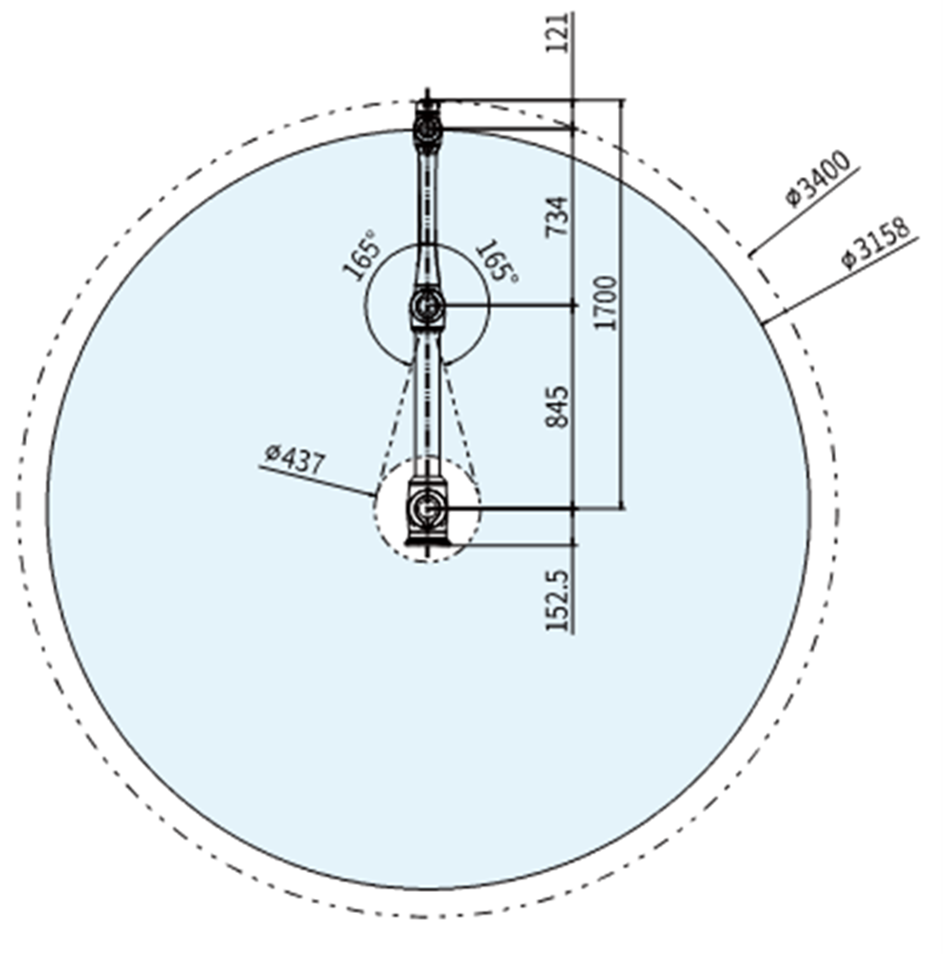
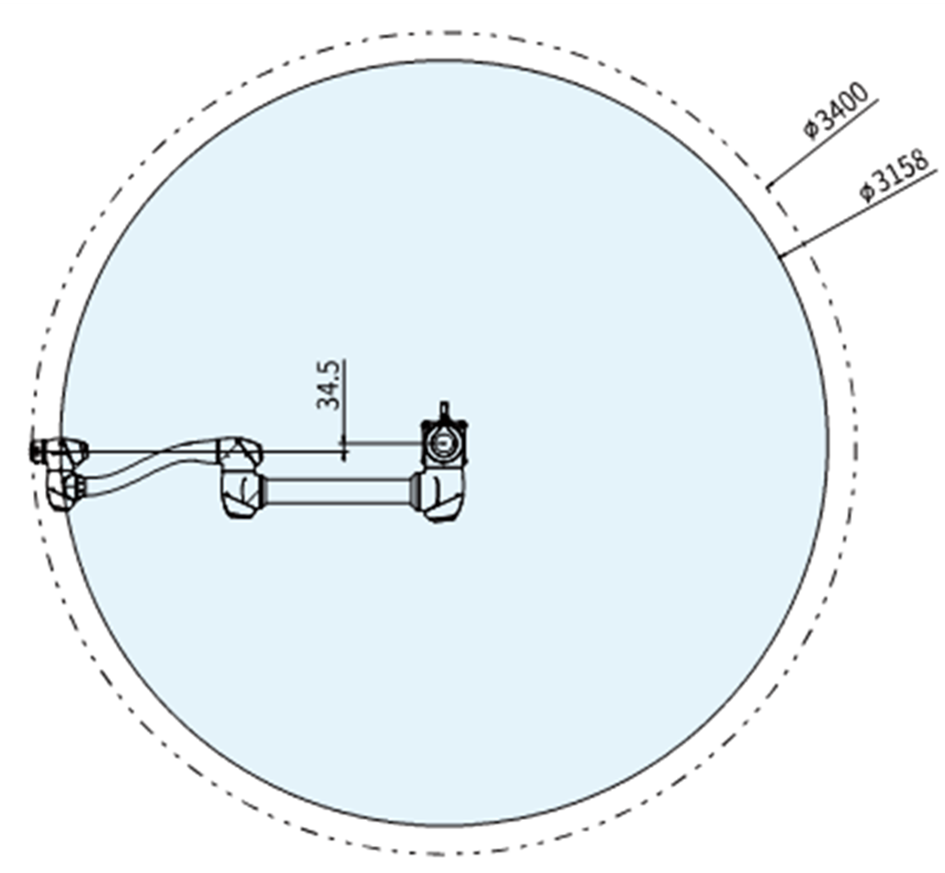
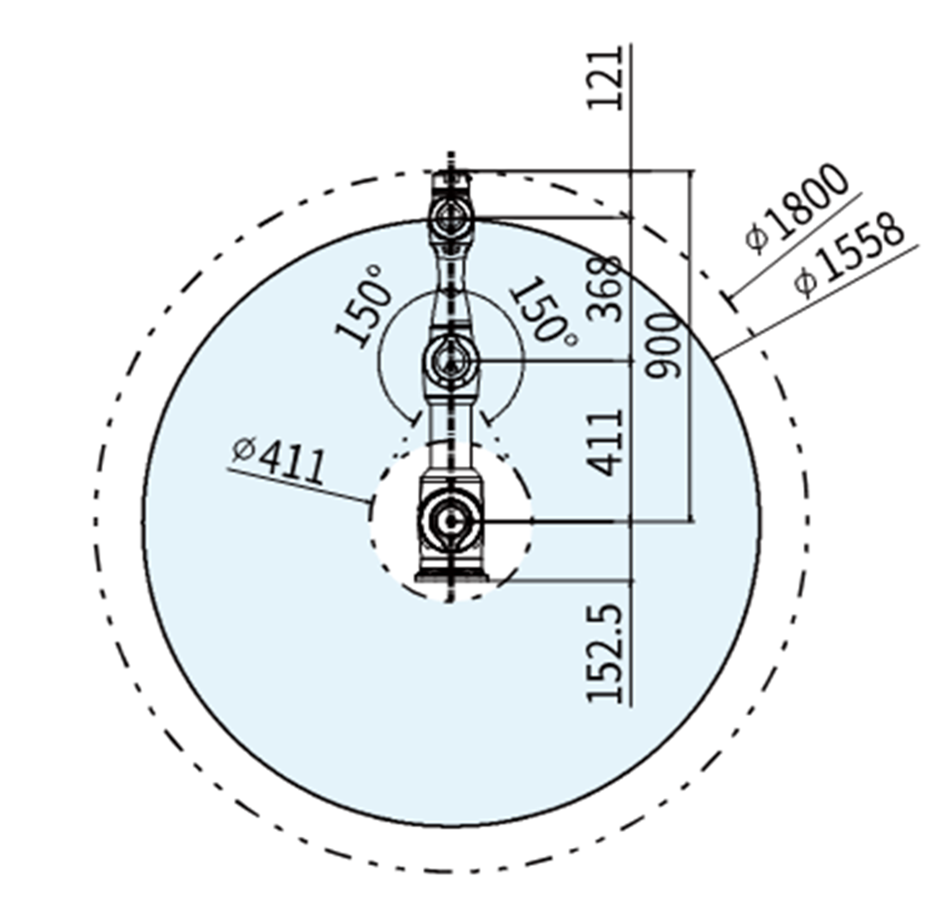
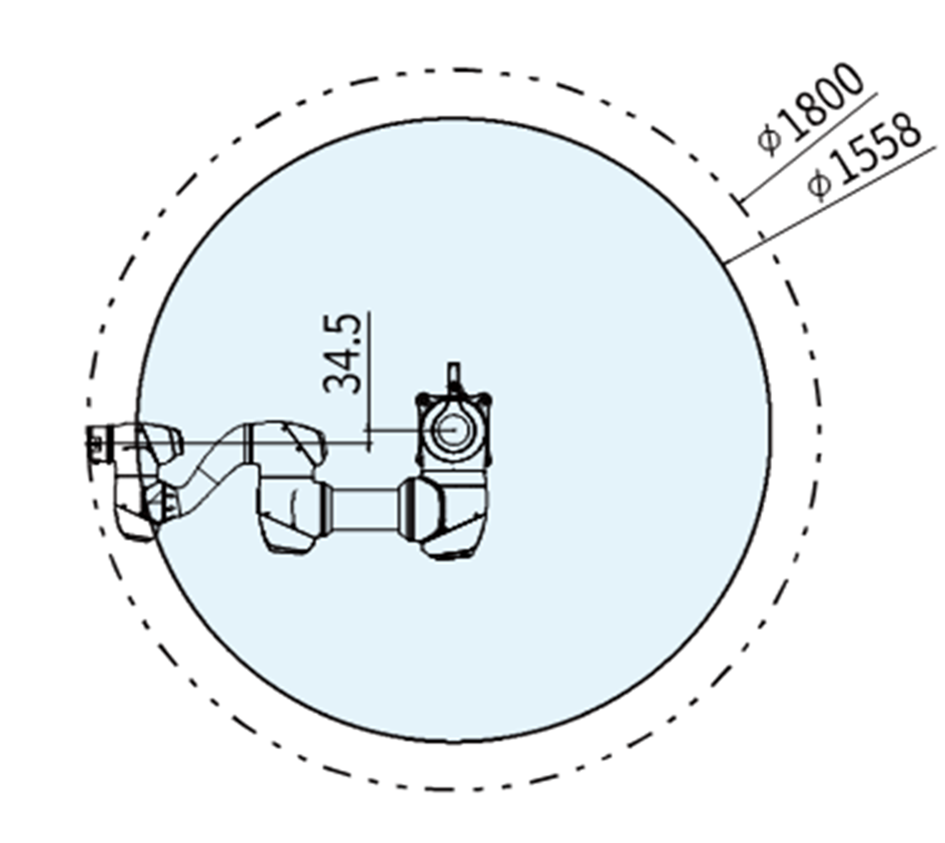
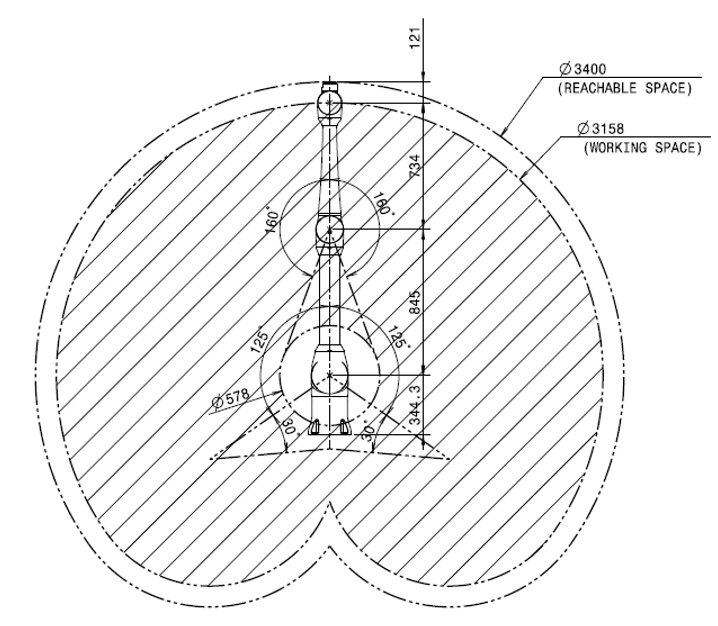
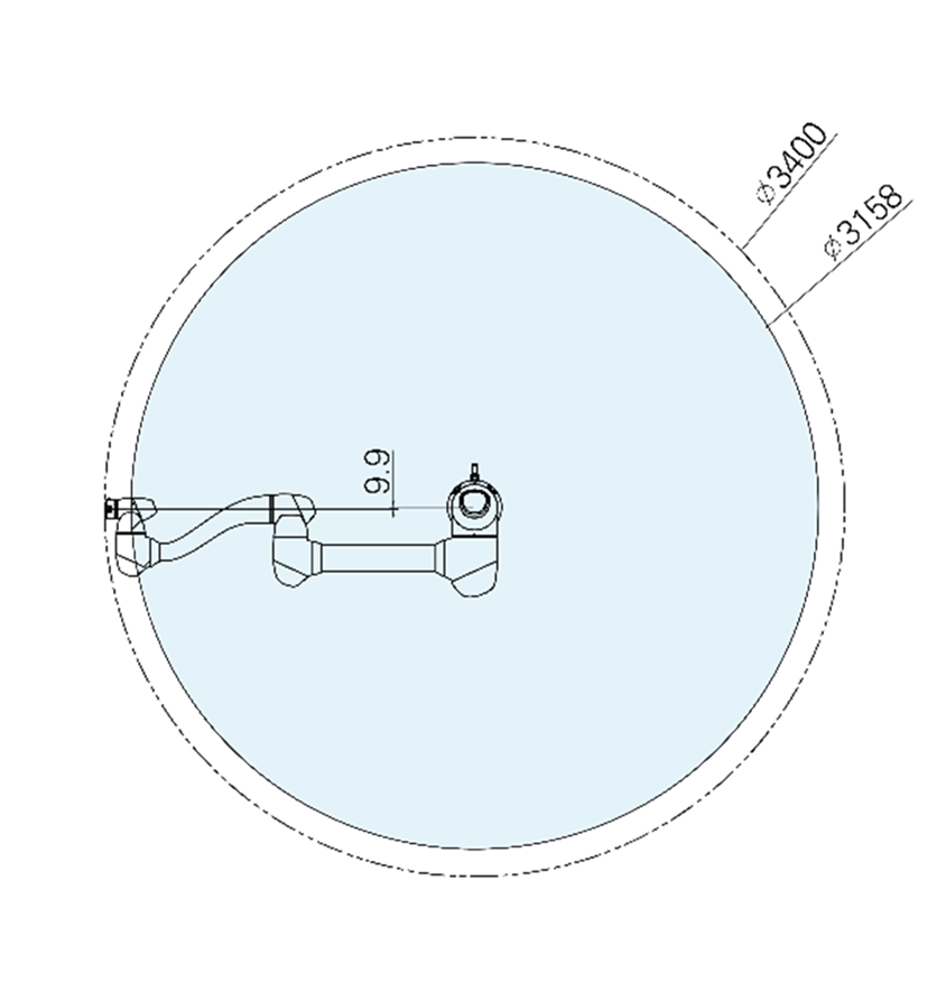
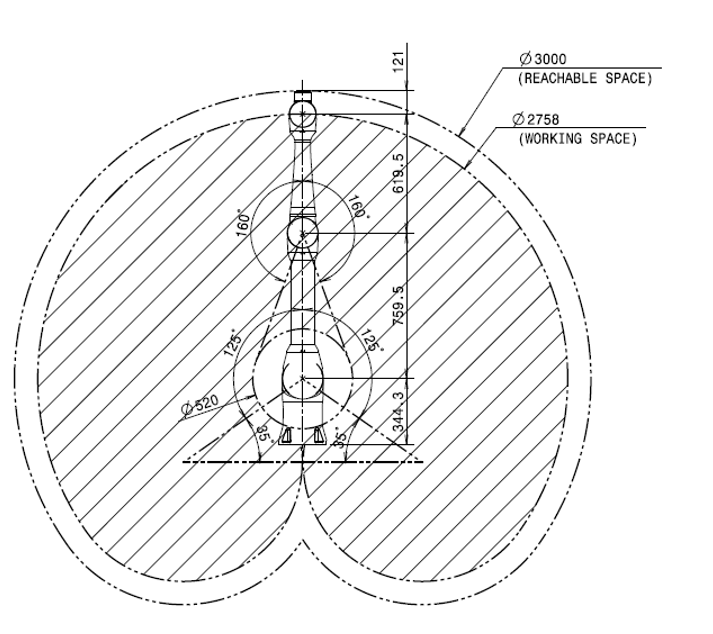
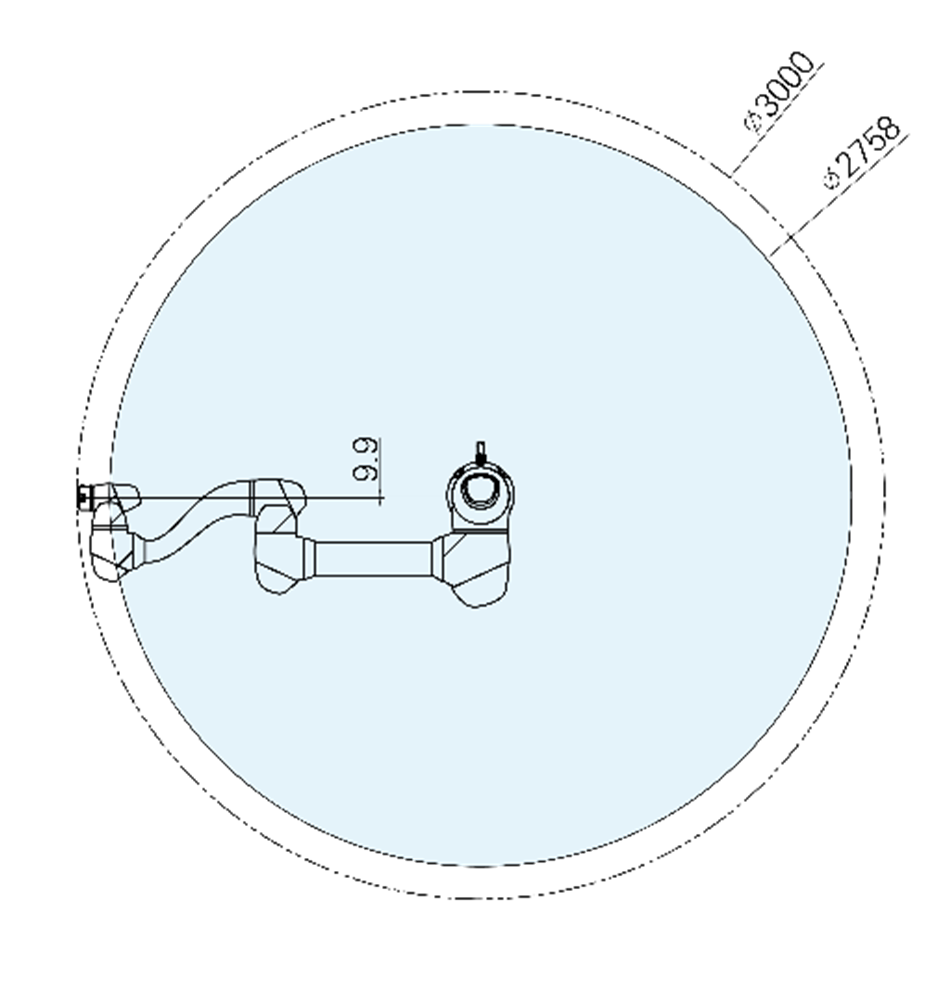
Espacio operativo del robot
M0609
 |  |
M0617
 |  |
M1013
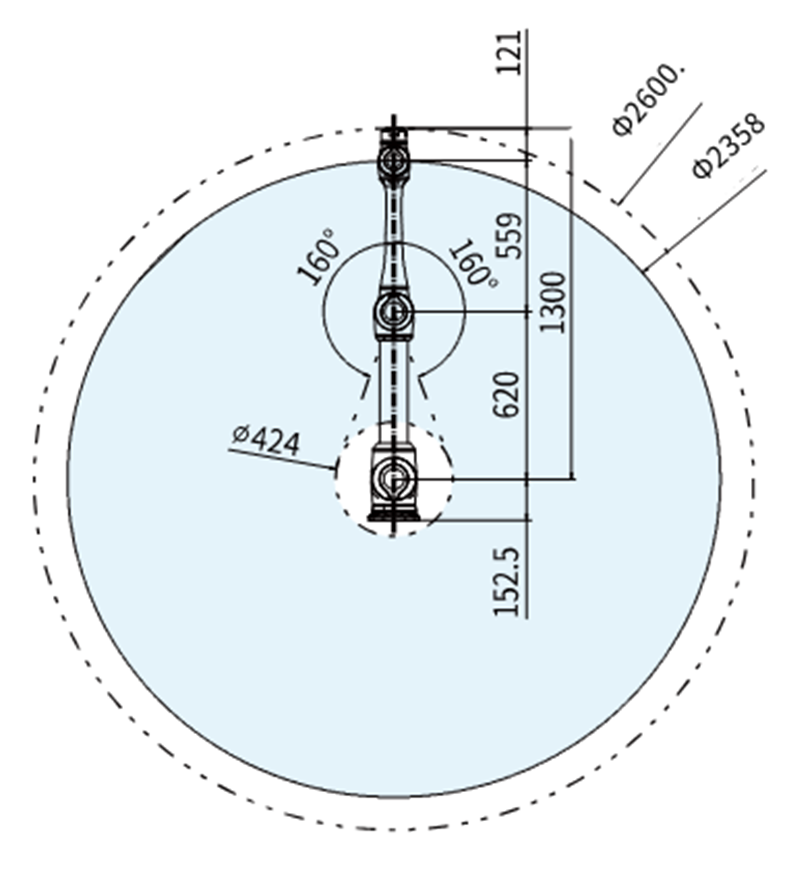 | 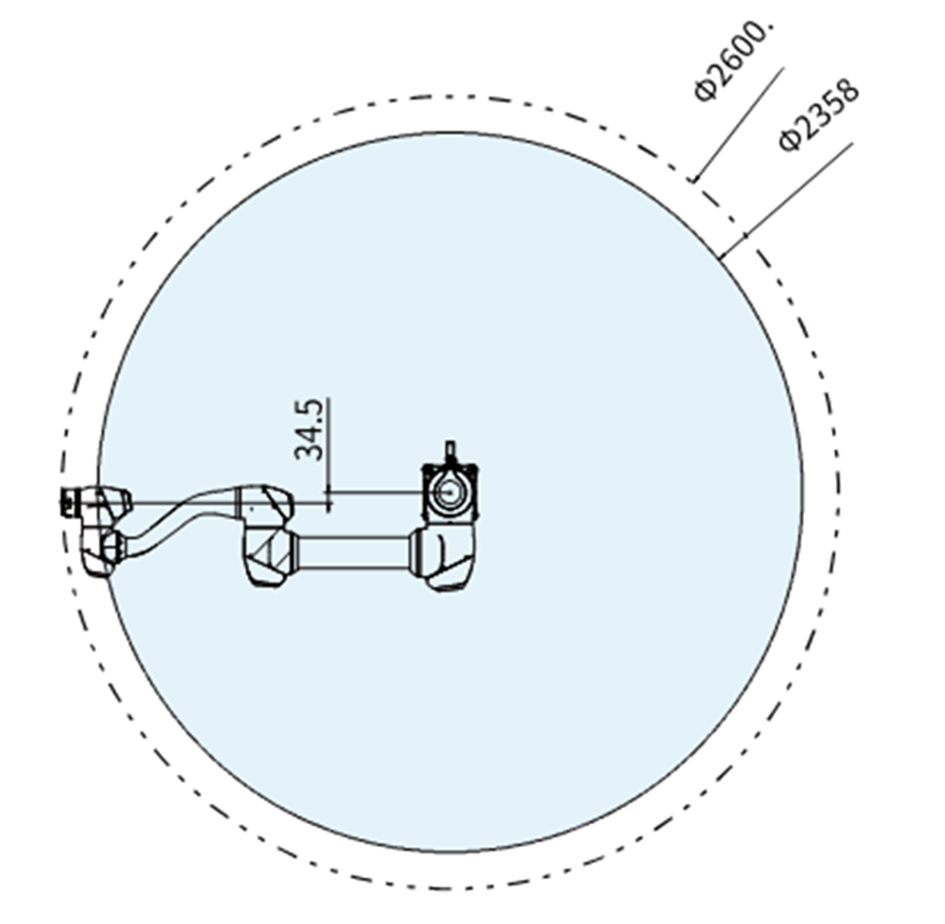 |
M1509
 |  |
H2017
 |  |
H2515
 |  |
Max. Carga útil dentro del espacio operativo
La carga útil máxima del robot dentro de su espacio de operación cambia según la distancia desde el centro de gravedad. La carga útil por distancia es la siguiente:
Nota
Este diagrama de carga asume un pequeño volumen de carga de herramienta. Las herramientas con un volumen mayor tendrán mayores limitaciones en la carga útil por encima del centro de gravedad de la herramienta en comparación con una herramienta con un peso igual pero un volumen menor, y en tales casos, puede producirse vibración.
M0609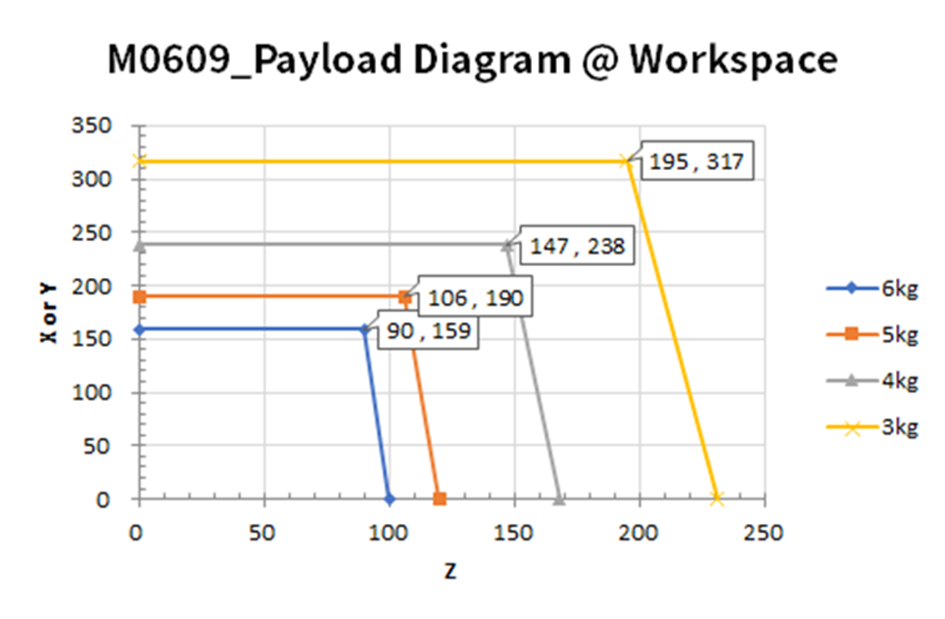 | M0609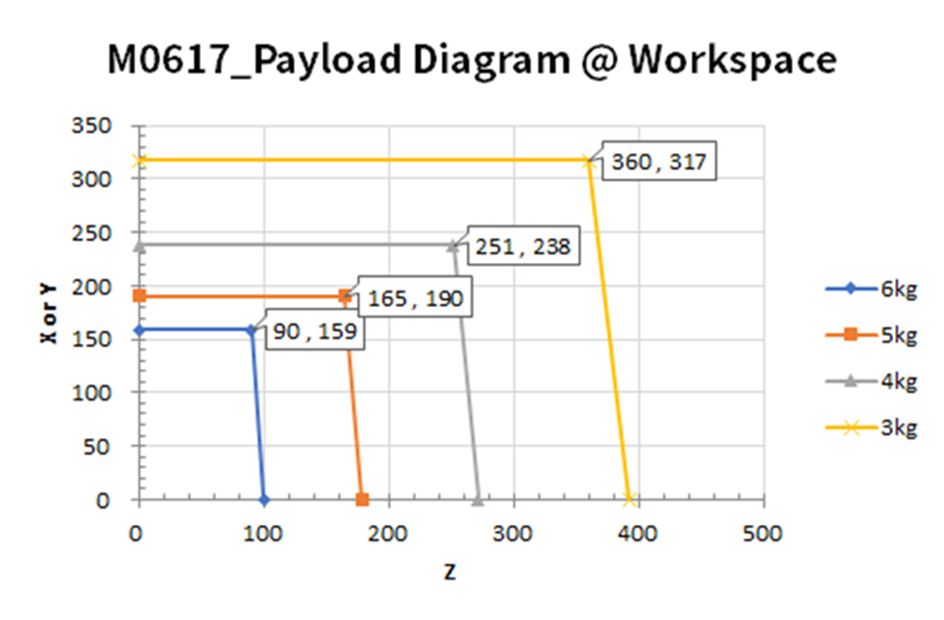 |
M1013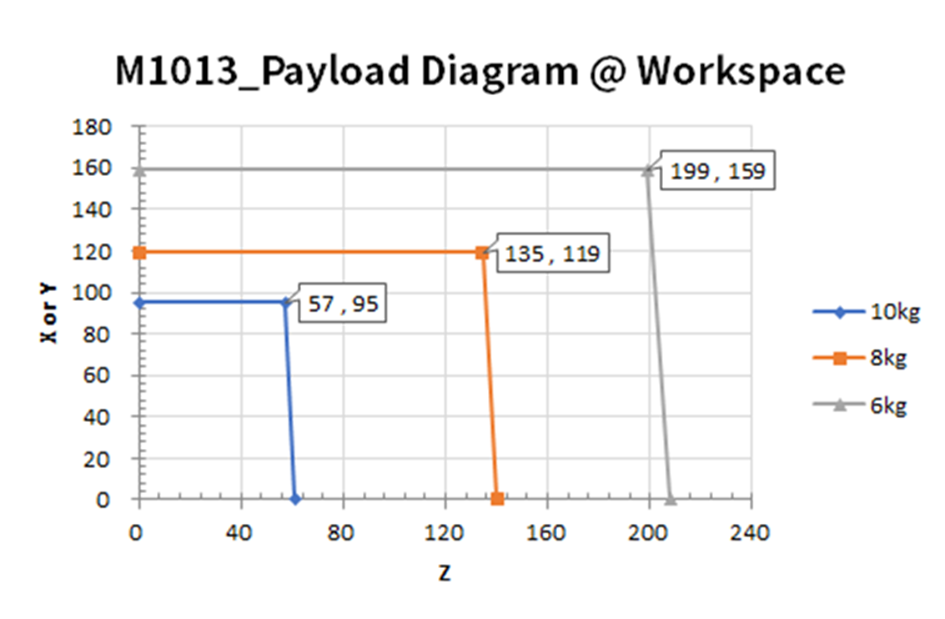 | M1509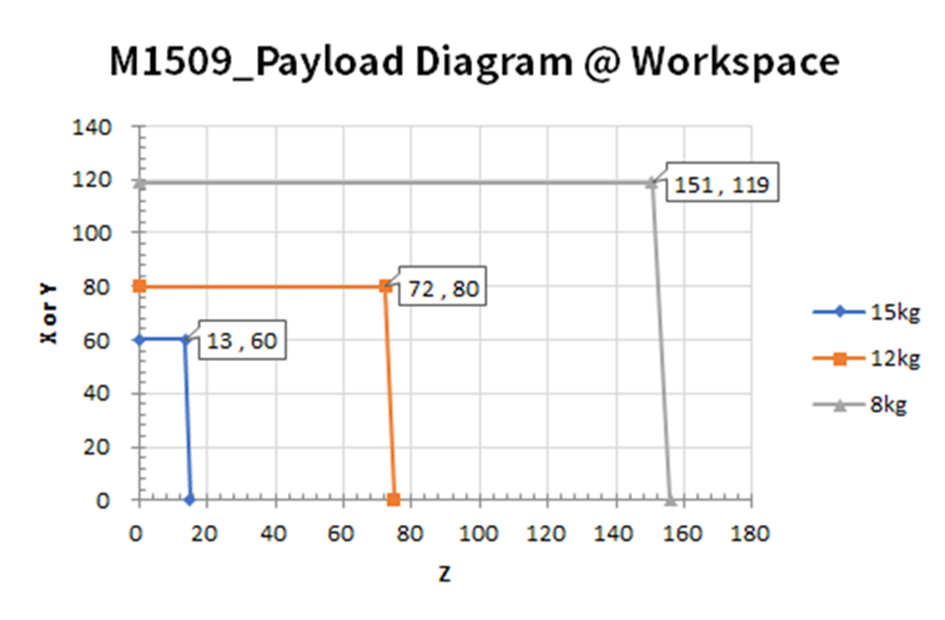 |
H2017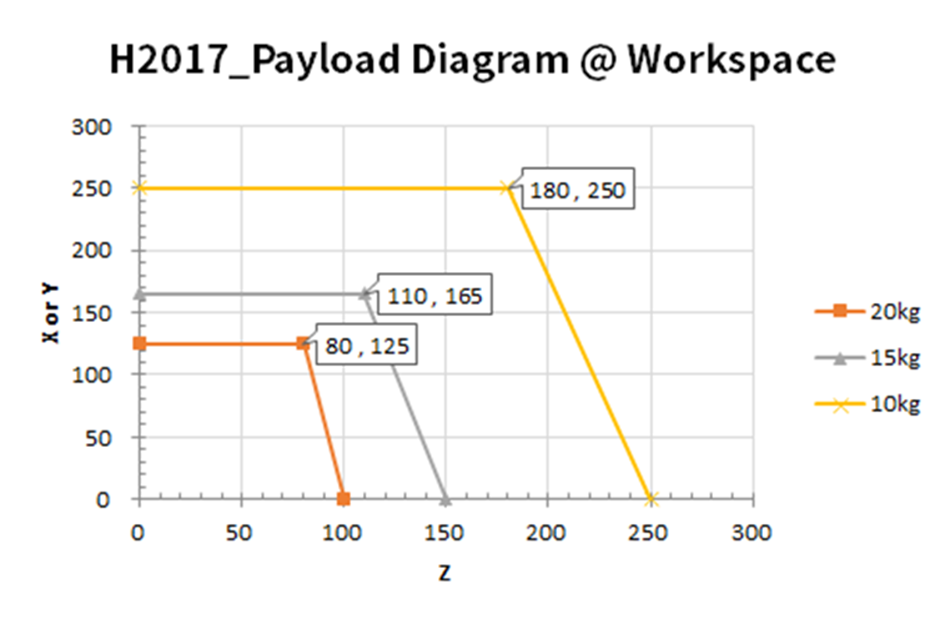 | H2515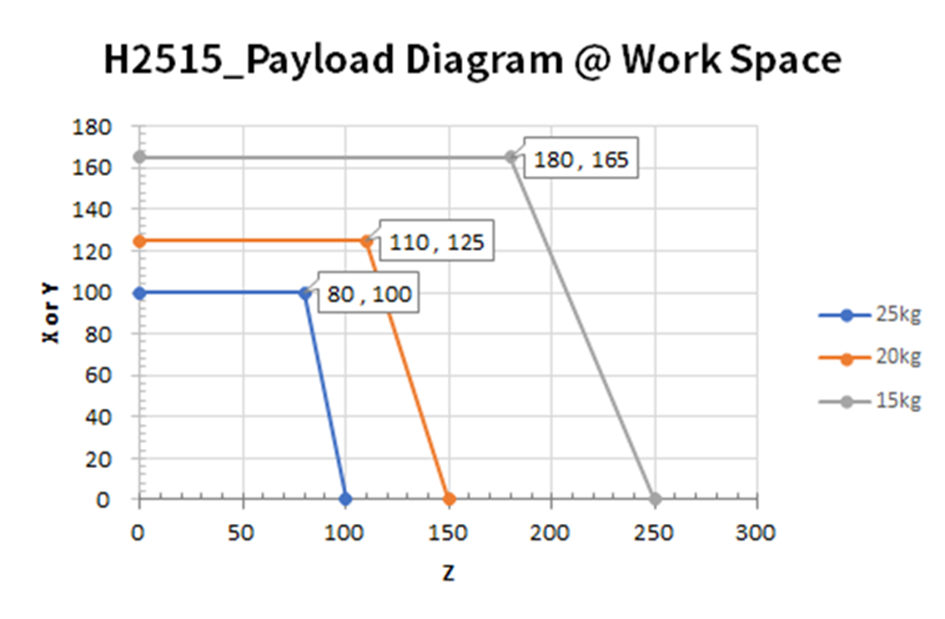 |
Momento permitido e inercia
El momento permitido y la inercia del J4-J6 del robot son los siguientes:
Nombre del modelo | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
Momento permitido | Inercia | Momento permitido | Inercia | Momento permitido | Inercia | |
M0609 | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ |
M0617 | ||||||
M1013 | ||||||
M1509 | ||||||
H2017 | 145 Nm | 8.0 kg㎡ | 81 Nm | 4.5 kg㎡ | 36 Nm | 2.0 kg㎡ |
H2515 | ||||||
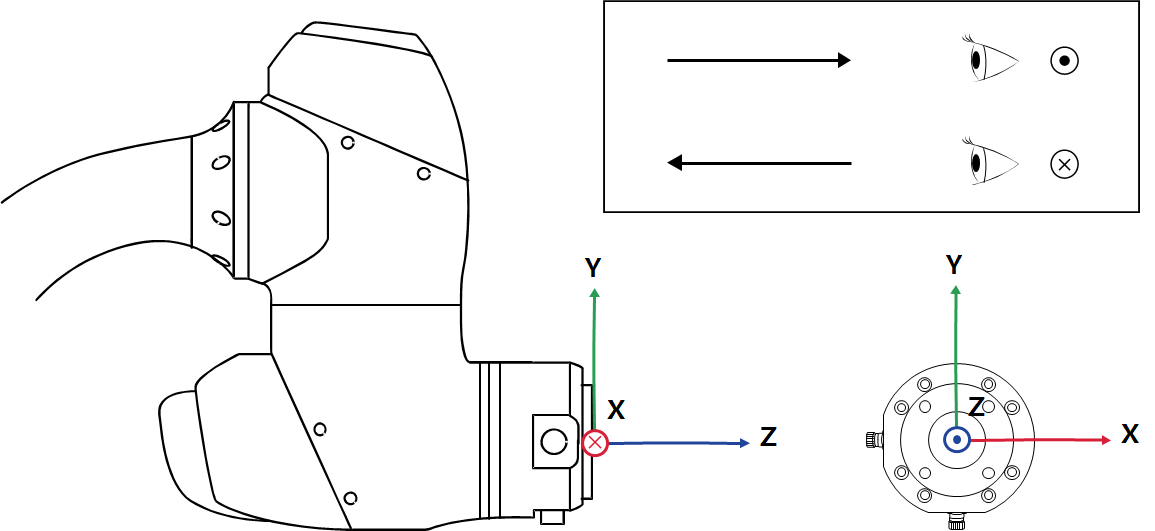
Punto central de herramientas (TCP)
Refiérase a la figura de abajo para TCP.
Especificaciones básicas
Nombre del modelo | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 | |
|---|---|---|---|---|---|---|---|
Peso | 27 kg | 34 kg | 33 kg | 32 kg | 79 kg | 77 kg | |
Carga útil dentro del radio de trabajo | 6 kg | 6 kg | 10 kg | 15 kg | 20 kg | 25 kg | |
Max. Radio de trabajo | 900 mm | 1700 mm | 1300 mm | 900 mm | 1700 mm | 1500 mm | |
Número de ejes | 6 | ||||||
Max. Velocidad TCP | Más de 1 m/s | ||||||
Repetibilidad de posición (ISO 9283) | ±0.03 mm | ±0.1 mm | ±0.05 mm | ±0.03 mm | ±0.1 mm | ||
Clasificación de protección | IP 54 | ||||||
Ruido | < 65 dB | ||||||
Dirección de instalación | Cualquier orientación | Sólo piso | |||||
Controlador y Enseñanza Colgante | Doosan Controller & Teach Colgante | ||||||
Vibración y aceleración | 10≤f㎐ - 0.075mm amplitud 57≤f≤150㎐ – 1G | ||||||
Impacto | Amplitud máxima : 50㎨(5G)
| ||||||
Temperatura de funcionamiento | 0 ℃ ~ 45 ℃ (273K a 318K) | ||||||
Temperatura de almacenamiento | -5 ℃ ~ 50 ℃ (268K a 323K) | ||||||
Humedad | 20% ~ 80% | ||||||
Especificaciones del eje
Nombre del modelo | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 |
|---|---|---|---|---|---|---|
Ángulo de funcionamiento | ||||||
J1 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J2 | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±125° (TP:±95°) | ±125° (TP:±95°) |
J3 | ±150° (TP:±125°) | ±165° (TP:±145°) | ±160° (TP:±135°) | ±150° (TP:±125°) | ±160° (TP:±135°) | ±160° (TP:±135°) |
J4 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J5 | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) |
J6 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
Max. Velocidad por eje (operación de carga útil nominal) | ||||||
J1 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 100 °/s | 100 °/s |
J2 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 80 °/s | 80 °/s |
J3 | 180 °/s | 150 °/s | 180 °/s | 180 °/s | 100 °/s | 100 °/s |
J4 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J5 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J6 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |