
Pasos de operación del Remote Control Mode
1. Crea un programa
Debe crear un programa para controlar de forma remota con antelación.
Cree una tarea en el módulo Editor de tareas.
Guarde la tarea cuando la creación esté completa.
2. Configuraciones obligatorias
En el módulo Control remoto, debe configurar los siguientes elementos requeridos:
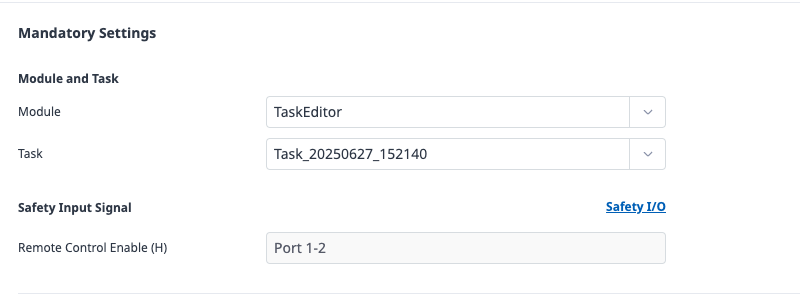
Seleccione módulos y tareas
Seleccione el módulo y la tarea a ejecutar de la lista.
Especificar Control remoto Habilitar señales
En el menú de E/S de seguridad del módulo de parámetros Robot, seleccione la señal Activar control remoto y asigne el puerto a utilizar.
El modo de control remoto no se puede ejecutar si los ajustes necesarios no se completan.
3. Ajustes avanzados (opcional)
Si es necesario, puede especificar configuraciones avanzadas.
Si no está configurada, esta característica permanece deshabilitada y no tiene ningún impacto en el funcionamiento del control remoto.
Inicie automáticamente en el reinicio

Cuando esta opción está habilitada, el sistema entrará automáticamente en la pantalla del control remoto cuando se encienda la alimentación del robot.
Señales de salida de seguridad
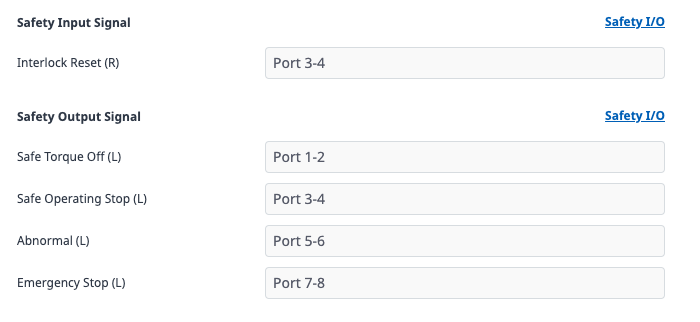
Asigne puertos de salida paraseñales STO (Safe Torque Off) y SOS (Safe Operating Stop).
Nota
Para obtener más información sobre cada señal, consulte la Seguridad Señal I/O.
Control de señales de entrada
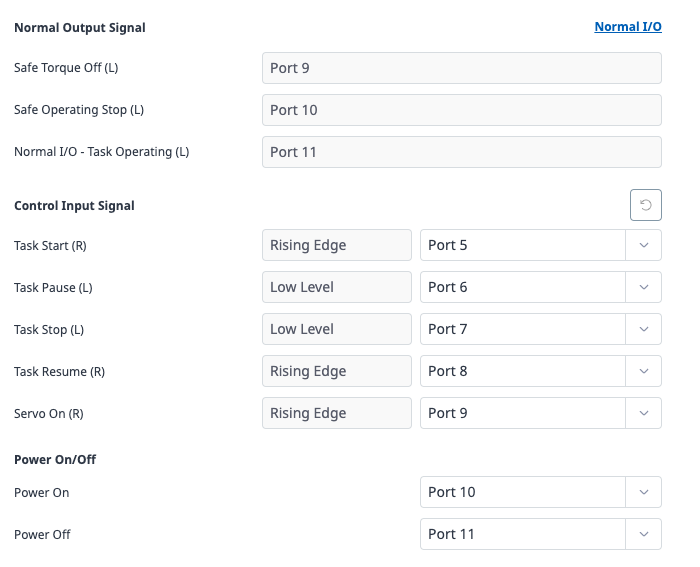
Establezca el puerto de entrada digital para los comandos Inicio, Detener, Pausa, Reanudar.
4. Entrar en el modo de control remoto
Una vez que se complete la configuración, puede entrar en el modo de control remoto.
En la pantalla Módulo de control remoto, haga clic en el botón Iniciar control remoto.
5. Ejecuta el control remoto
Ejecute el programa designado de forma remota y supervise su estado.
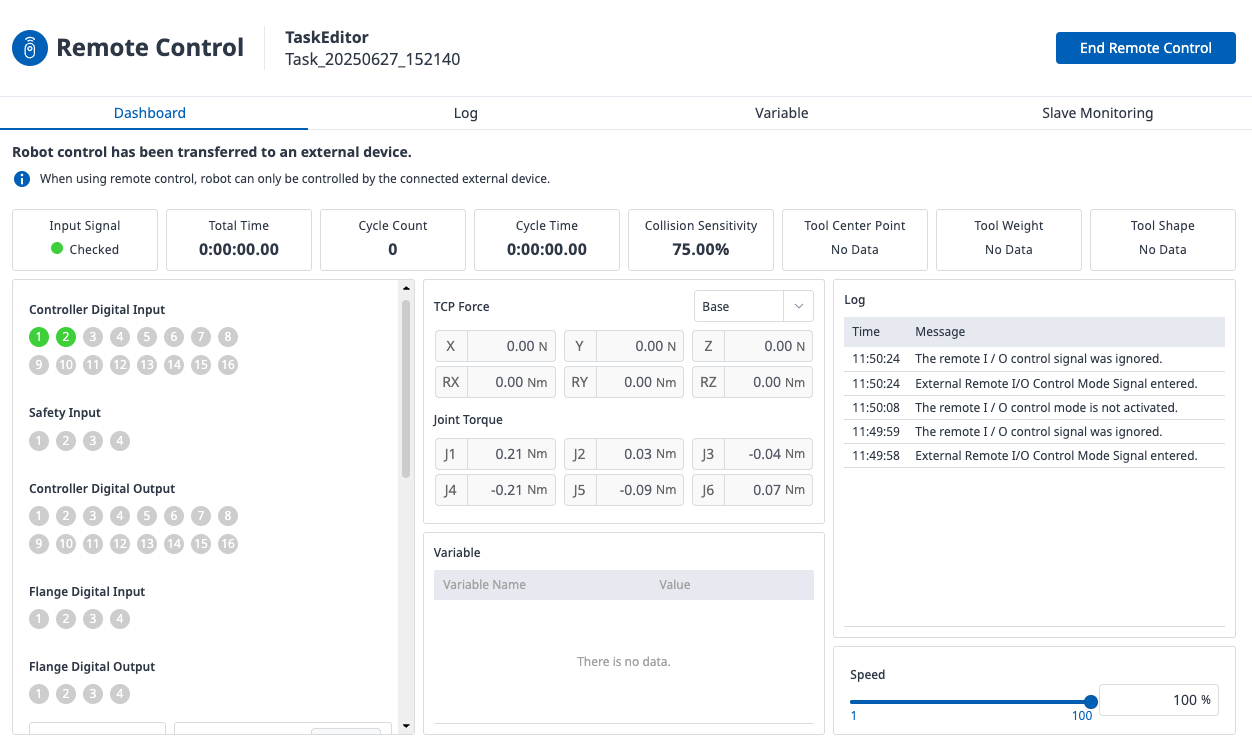
Por ejemplo, si desea ejecutar una tarea designada en el robot después de entrar en el modo de control remoto, primero puede activar el servo enviando una señal de Servo On (borde ascendente) al puerto asignado y, a continuación, enviar una señal de inicio de tarea (borde ascendente) para ejecutar la tarea seleccionada en la configuración requerida.
Estas señales son opcionales, por lo que el robot puede entrar en el modo de control remoto sin ellas. Sin embargo, para utilizar estas funciones opcionales dentro del modo, debe asignar los puertos necesarios y aplicar las señales correspondientes correctamente.