Descripción general de Límite de Espacio y Forma de Zonas
Cómo establecer la forma del límite de espacio/zona es la siguiente.
Temas
Descripción
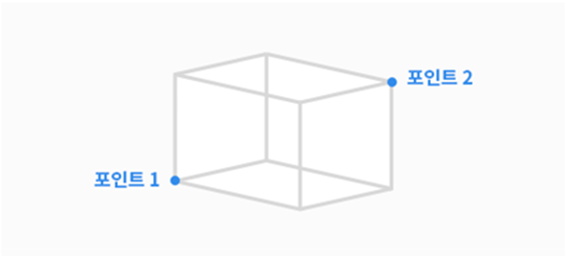
Cuboide
La forma del límite de espacio/zona se crea como un cuboide.
Introduzca el punto final inferior (punto 1) y el punto final superior (punto 2) del cuboide y pulse el botón Guardar Pose.
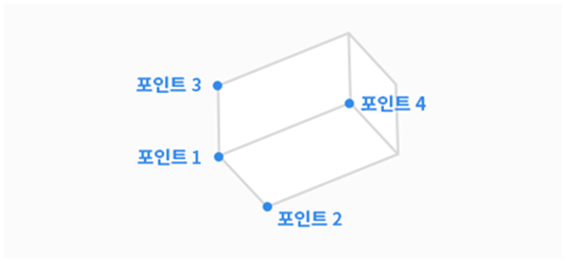
Cuboide inclinado
La forma del límite de espacio /zona se crea como un cuboide inclinado.
Fijación por 4 puntos
Introduzca el punto de referencia (punto 1), el punto final del eje x (punto 2), el punto final del eje y (punto 3) y el punto final del eje z (punto 4) del cuboide inclinado y pulse el botón Guardar postura.
3 líneas (punto 1-punto 2, punto 1-punto 3, punto 1-punto 4) deben cruzarse entre sí en ángulo recto. (una desviación de +/- 5 grados es aceptable)
Si utiliza funciones de movimiento restringido como "Constricción de plano" y "Constricción de eje" en la cabina utilizando el punto 1 como punto de referencia, los puntos para el punto 2, el punto 3 y el punto 4 son más fáciles de encontrar.
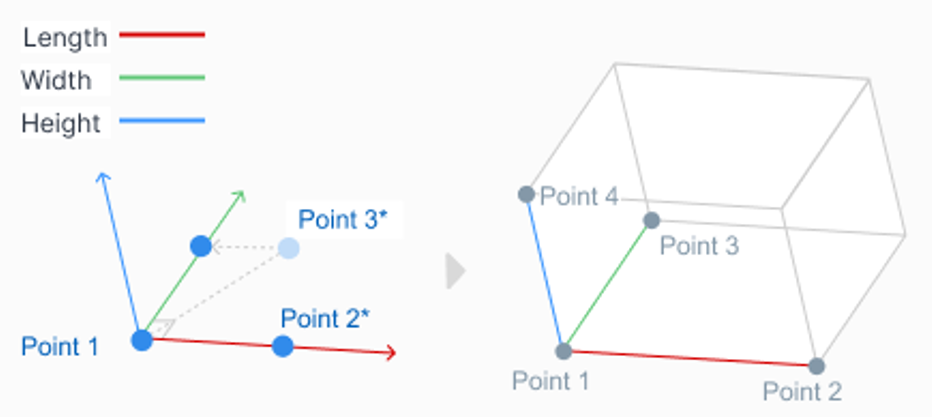
Fijación por 3 puntos y altura
Indíquese el punto de referencia (punto 1), el punto del eje x (punto 2) y el punto del plano xy (punto 3).
La ubicación del punto en el plano xy (punto 3) determina la dirección del eje y, que es perpendicular a la línea formada por el punto de referencia (punto 1) y el punto en el eje x (punto 2) y situado en el plano xy.
Una vez que se determinan el punto de referencia, la dirección del eje x y la dirección del eje y, la dirección del eje z se determina mediante la regla de la derecha.
Después de determinar el punto de referencia y las direcciones de los tres ejes, el tamaño del cuboide inclinado se puede especificar estableciendo la longitud, el ancho y la altura.
El cuboide inclinado se puede mover paralelo (traducción paralela) estableciendo el desplazamiento x, y y z.
Después de alcanzar el punto final (vértice) del cuboide inclinado presionando “Mover to” al lado del punto real 1, luego presionando “Mover to” al lado del punto real 2, punto real 3, o punto real 4, el robot TCP lo moverá a lo largo del borde del cuboide inclinado hasta donde pueda alcanzar. La posición y la dirección del cuboide inclinado se pueden verificar de esta manera.
Cilindro
La forma del límite de espacio/zona se crea como un cilindro.
Introduzca el punto a una distancia de radio, el punto del plano superior y el punto del plano inferior del cilindro, y toque el botón Guardar Pose.
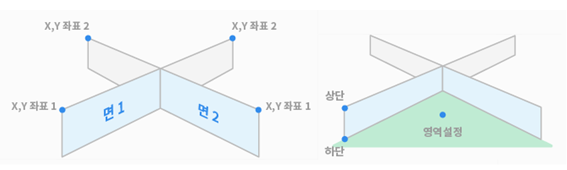
Caja multi-plano
La forma del límite de espacio/zona se crea como una caja multiplano.
Establezca la altura de la parte superior e inferior de la caja de varios planos y presione el botón Agregar Pose para agregar un plano.
Seleccione las coordenadas X e Y para establecer la dirección del plano y pulse el botón Guardar Pose. Se pueden configurar hasta 6 planos.
Establezca las coordenadas del punto en el área que desea establecer.
Esfera
La forma del límite de espacio/zona se crea como una esfera.
Para configurar el radio, introduzca las posiciones del punto central y el punto final de la esfera, y para configurar el diámetro, introduzca dos puntos finales de la esfera y, a continuación, toque el botón Guardar Pose.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.