
Configuración y uso de protocolos extendidos
Protocolo ampliado: configuración del PROFINET IO Device (PNIO device)
Los controladores del robot de Doosan Robotics admiten la función PROFITNET IO Device (Slave), que permite la modificación de datos después de la lectura de parámetros del robot desde un dispositivo externo (PROFINET IO Controller/Master). (Por ejemplo, Monitoreo de parámetros de robot, Registro de propósito general (BIT, Int, Float) – Usando el Registro de propósito general (GPR))
Nota) Para obtener más información sobre PROFINET, visite http://www.profibus.com
Protocolo ampliado: configuración del adaptador EtherNet/IP Adapter (EIP adapter)
Los controladores de robot de Doosan Robotics soportan la función Adaptador Ethernet/IP (Esclavo), que permite la modificación de los datos después de leer los parámetros del robot desde un dispositivo externo (Ethernet/IP Scanner / Master). (Por ejemplo, Monitoreo de parámetros de robot, Registro de propósito general (BIT, Int, Float) – Usando el Registro de propósito general (GPR))
Nota 1) Para obtener más información sobre Ethernet/IP, consulte www.odva.org.
Nota 2) La IP predeterminada inicial es 192.168.137.50. Después de eso, puede cambiar la IP del controlador dependiendo del uso de la aplicación de control PLC.
Uso de Protocolo Ampliado
Las funciones del dispositivo PROFINET IO (dispositivo PNIO) y del adaptador Ethernet/IP (adaptador EIP) comienzan juntas al arrancar el controlador y están en estado de espera de conexión con el dispositivo maestro. Por lo tanto, para utilizar la función, es necesario conectar y configurar el Maestro. Cada dispositivo Master tiene características diferentes, por lo que es necesario comprobarlas.
Nota
Las siguientes son descripciones de las características de implementación de las funciones generales para Ethernet Industrial.
La función Industrial Ethernet de los controladores Doosan Robotics no utiliza un ASIC separado, pero implementa su función basada en TCP/IP, por lo que no admite el rendimiento en tiempo real.
La salida de datos a dispositivos externos tiene marcas idénticas (PNIO, EIP), pero la entrada de datos al robot solo tiene estructuras idénticas y no se vincula. Por lo tanto, la salida de datos del controlador PNIO no se sincroniza con los datos de salida del escáner EIP.
Para la tabla de E/S de PNIO y EIP, consulte un documento separado (o anexo).
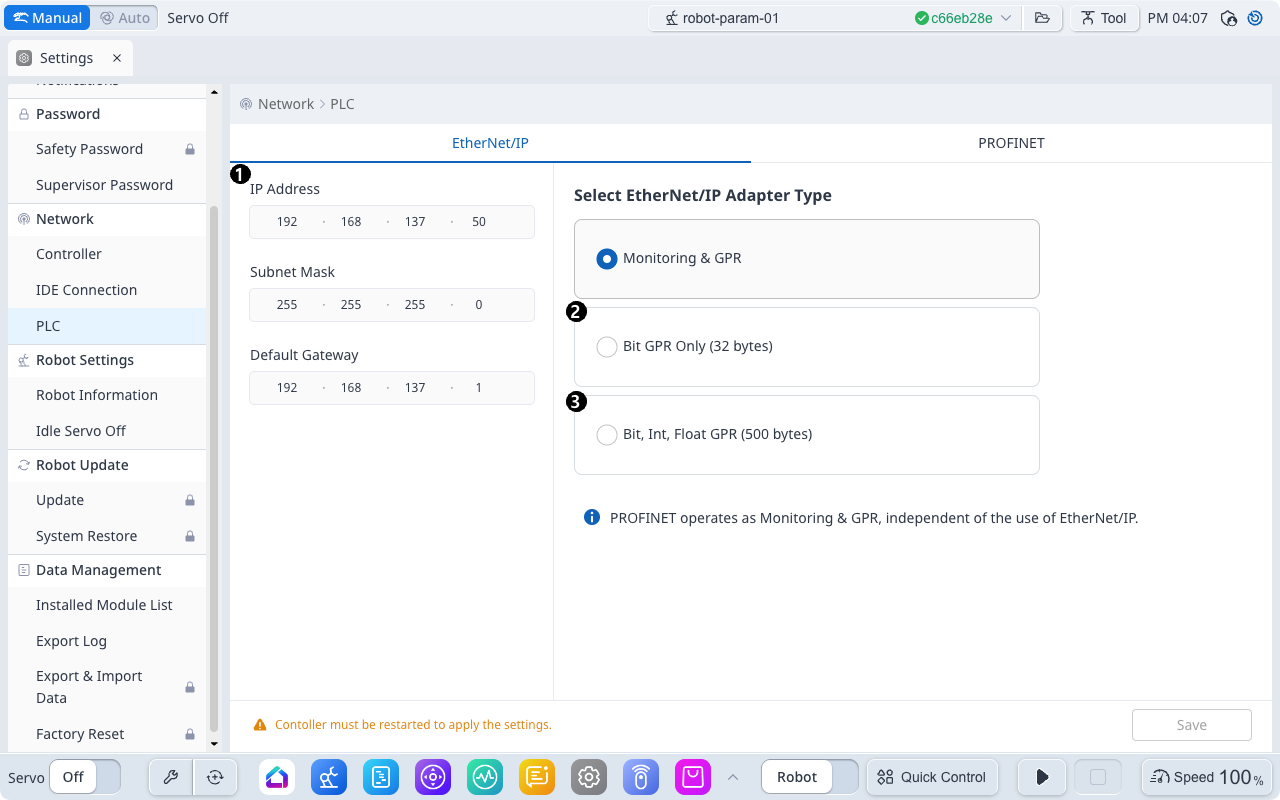
Mapa GPR completo de Ethernet/IP
El mapa GPR completo de Ethernet/IP está disponible que admite diferentes tipos de E/S en el robot.
Bit I/O GPR 24ea
Entero I/O GPR 50ea
I/O flotante GPR 50ea
En el menú izquierdo del módulo de Configuración, seleccione PLC para ir a la pantalla de abajo. (Consulte Configurar en la sección Red)
En la imagen de abajo, el elemento 3 es el mapa GPR completo, y la configuración se guarda solo después de guardar y reiniciar.
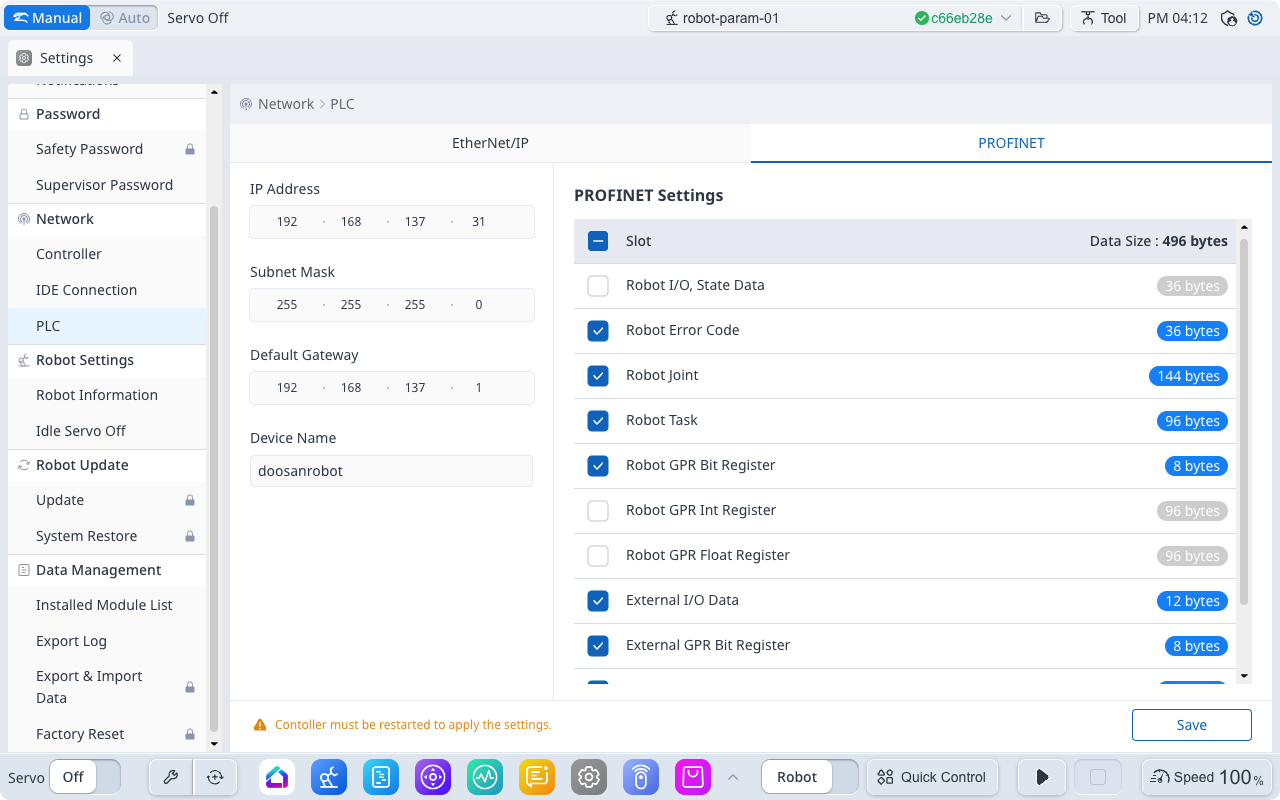
Ranura PROFINET
Para la optimización de la red, solo las ranuras interesadas pueden usar la capacidad de realizar transacciones.
Ranura#1: Estado del robot (T2O)
Ranura#2: Código de error del robot (T2O)
Ranura#3: Articulación (T2O)
Ranura#4: Tarea (T2O)
Ranura#5: Bit GPR (T2O)
Ranura#6: Int GPR (T2O)
Ranura#7: GPR flotante (T2O)
Ranura#8: CONTROL DE E/S (O2T)
Ranura#9: Bit GPR (O2T)
Ranura#10: Int GPR (O2T)
Ranura#11: GPR flotante (O2T)
En el menú izquierdo del módulo Configuración, seleccione PLC y seleccione la pestaña PROFINET para ver la pantalla de abajo. (Consulte Configurar en la sección Red)
Puede usar la casilla de verificación en el centro para seleccionar solo las ranuras en las que el usuario está interesado, y la configuración se guarda solo después de guardar y reiniciar.
Información de código de error de robot
En un entorno sin TP (HMI), el usuario puede comprobar la información del código de error del robot a través del PLC (Consulte Configurar en la sección Red)
Ethernet/IP
Nota
Ethernet/IP refleja hasta dos códigos de error debido al límite de transacción (500 bytes).
Offset de bytes | Descripción |
|---|---|
36 | Mayor y menor (código de error # 1)
|
40 | Año y mes y día y hora (código de error #1)
|
44 | Minuto & segundo & Milli-segundo (código de error # 1)
|
48 | Mayor y menor (código de error #2)
|
52 | Año y mes y día y hora (código de error #2)
|
56 | Minuto & segundo & Milli-segundo (código de error #2)
|
PROFINET: Ranura#2
Offset de bytes | Descripción |
|---|---|
0 | Mayor y menor (código de error # 1)
|
4 | Año y mes y día y hora (código de error #1)
|
8 | Minuto & segundo & Milli-segundo (código de error # 1)
|
12 | Mayor y menor (código de error #2)
|
16 | Año y mes y día y hora (código de error #2)
|
20 | Minuto & segundo & Milli-segundo (código de error #2)
|
24 | Mayor y menor (código de error #3)
|
28 | Año y mes y día y hora (código de error #3)
|
32 | Minuto & segundo & Milli-segundo (código de error #3)
|