
Mover pantalla
Mover diseño de menú
| Artículo | Descripción | |
|---|---|---|
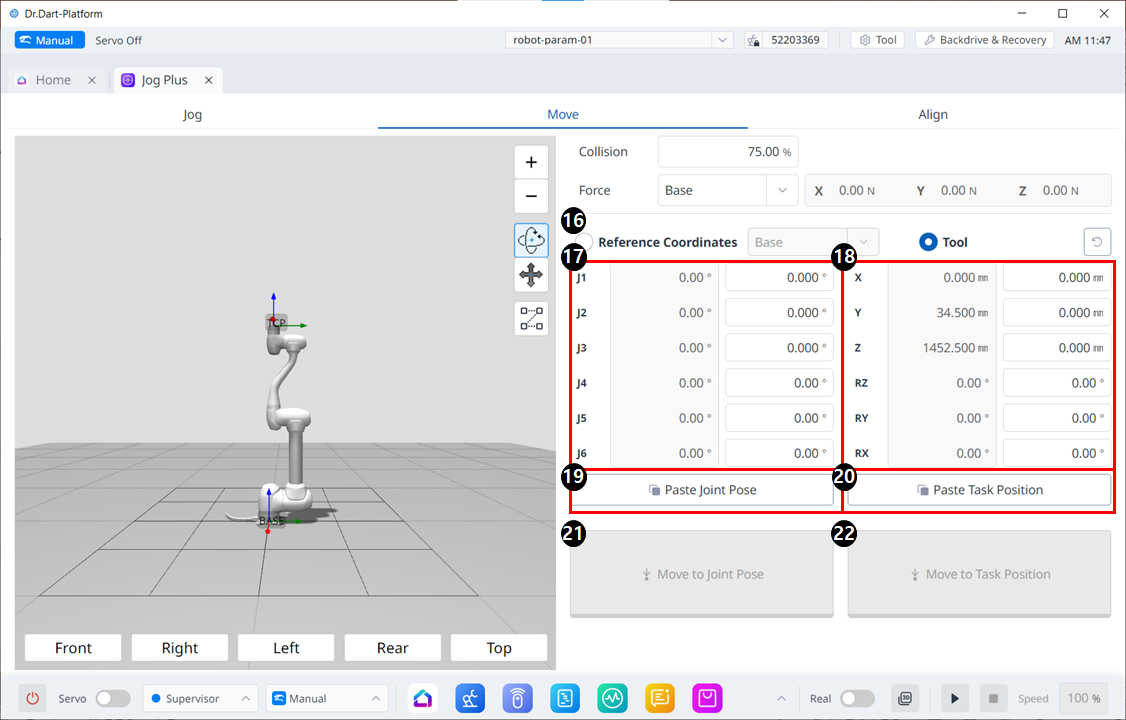
| 16 | Reference Coordinates | Seleccione el sistema de coordenadas de referencia que se utilizará para las coordenadas de la tarea en la Figura 18. Puede elegir coordenadas base, mundial o de usuario. |
| 17 | Joint Posture | Muestra la postura actual del robot y la postura de la articulación objetivo. |
| 18 | Task Posture | Muestra la postura actual del robot y la postura de la tarea objetivo que se ajustan al sistema de coordenadas de referencia seleccionado. |
| 19 | Paste Joint Posture | Pegue el valor de postura copiado en el portapapeles en el panel de postura articular. |
| 20 | Paste Task Posture | Pegue el valor de postura copiado en el portapapeles en el panel de postura de la tarea. |
| 21 | Joint Move button | Este botón hace que el robot se mueva hasta la postura de la articulación objetivo. |
| 22 | Task Move button | Este botón hace que el robot se mueva a la postura de la tarea objetivo. |