Tack Welding (Temporary Welding)
The tack welding (temporary welding) function is provided to temporarily fix the substrate to a designated location before the main welding. A welding conditions for tack welding must be created, and it is possible to perform tack welding by moving the robot quickly with direct teaching. Tack welding is available with the following two methods.
TB/TW – Select Welding Command → Property Tab → Check Tack Welding Item
No.
Item
Description
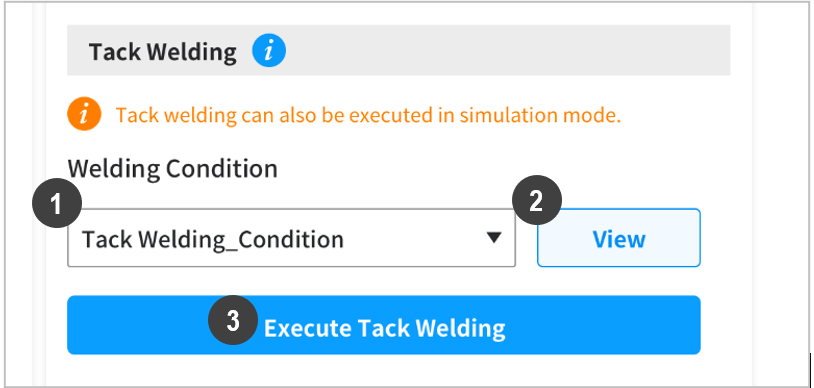
1
Select Welding Condition
Select a preset welding condition to use for tack welding, or save as a different name to use it later.
2
Confirm Welding Condition
Confirm the selected welding condition setting. This will display a popup.
3
Perform Tack Welding
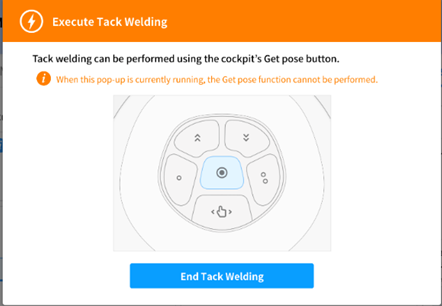
Popup Screen
A separate popup window will be displayed, and tack welding can be performed by moving the robot using direct teaching and the Get Pose button of the cockpit.
To end tack welding, press the End Tack Welding button.
Caution
- Tack welding can only be performed with the popup window displayed.
- Tack welding cannot be performed if the optional cockpit is not equipped
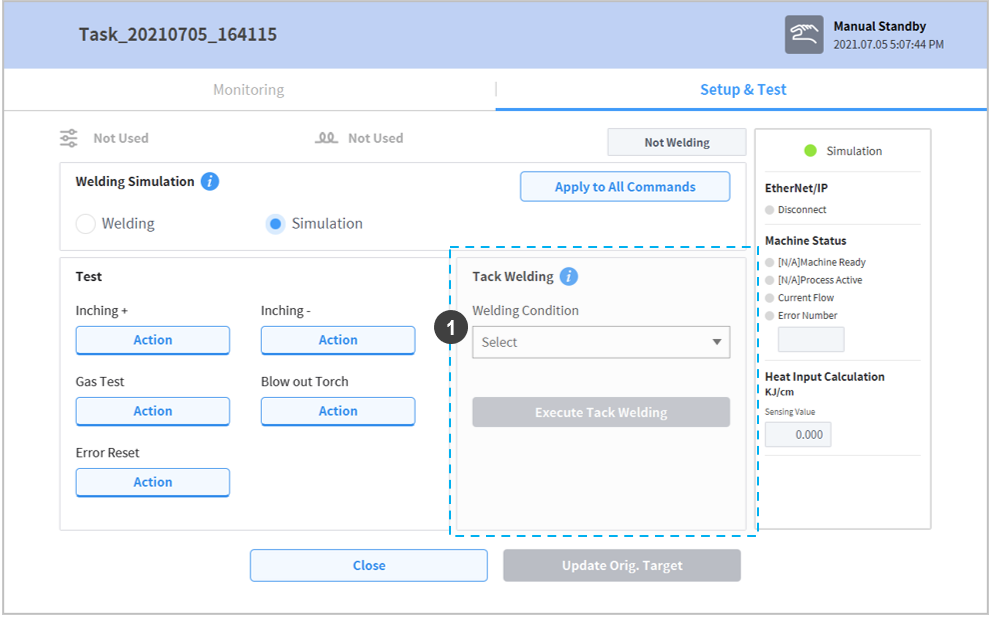
- Welding Control Popup → Setup & Test Tab → Check Tack Welding Item
Caution
After the Perform Tack Welding popup is displayed and the robot is moved with direct teaching, make sure not to confuse the Get Pose button and the cockpit button for tack welding. Movement with direct teaching is not available during tack welding.
Note
Setting the Point Lock (Orientation) and Angle Lock (Position) functions during direct teaching with the cockpit will make it easier to teach tack welding.
(Tips) Convenience Feature Setting for Tack Welding and Welding Section Teaching
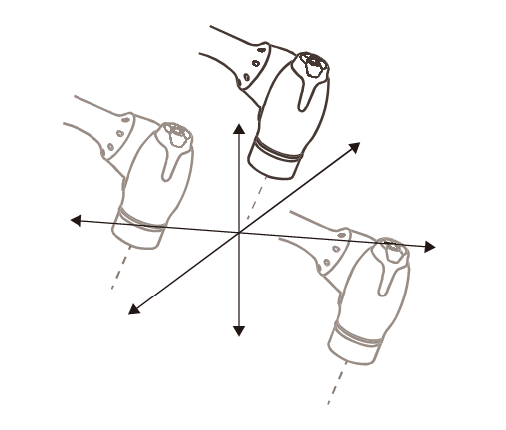
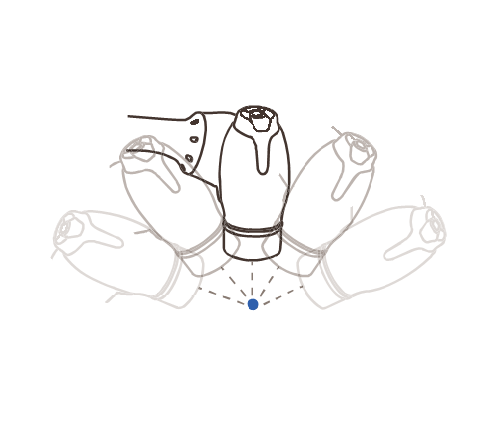
It possible to teach easier and quicker with fix angle and fix point functions during tack welding and welding section teaching with direct teaching. Fix angle function allows movement to the second point of the welding section while maintaining the direction set at the first point. Fix point function allows direction change with direct teaching while maintaining the current point. It is convenient to set the frequently used fix function on the Cockpit button.
| Fix Angle | Fix Point |
|---|---|
|
|
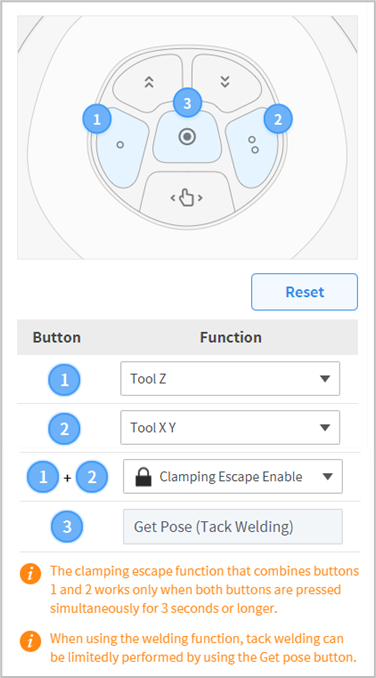
Cockpit Button Setting
Setting → Robot Setting → Button 1 (Point)/Button 2 (Direction) → Set