Welding Torch Settings
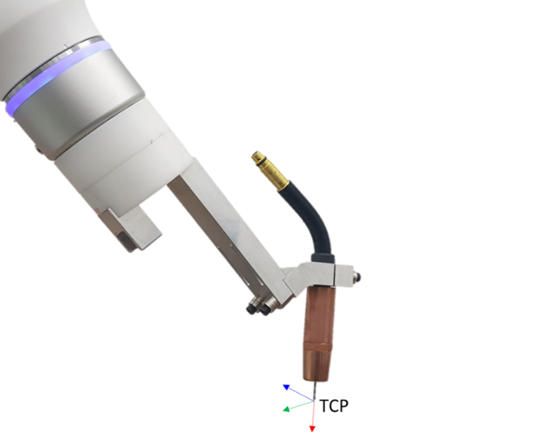
For welding that linear work using on the wire end of the welding torch, it is critical to enter accurate TCP information for the welding torch. The TCP pose during welding must be entered taking into account distance from the welding torch to the wire feed length (stick-out). Refer to the figure below.
Caution
After the welding torch information is set, the set torch TCP must be selected (activated) in the tool/TCP selection menu for the information to be ultimately applied to the robot’s location. Simply changing the welding torch settings will not automatically result in them being applied. The presumed welding torch TCP information is not automatically applied; when teaching welding work, the welding torch set prior to teaching must be selected and the information applied.