Product Introduction (CS-12P)
Names and Functions
DC Controller (CS-12P)
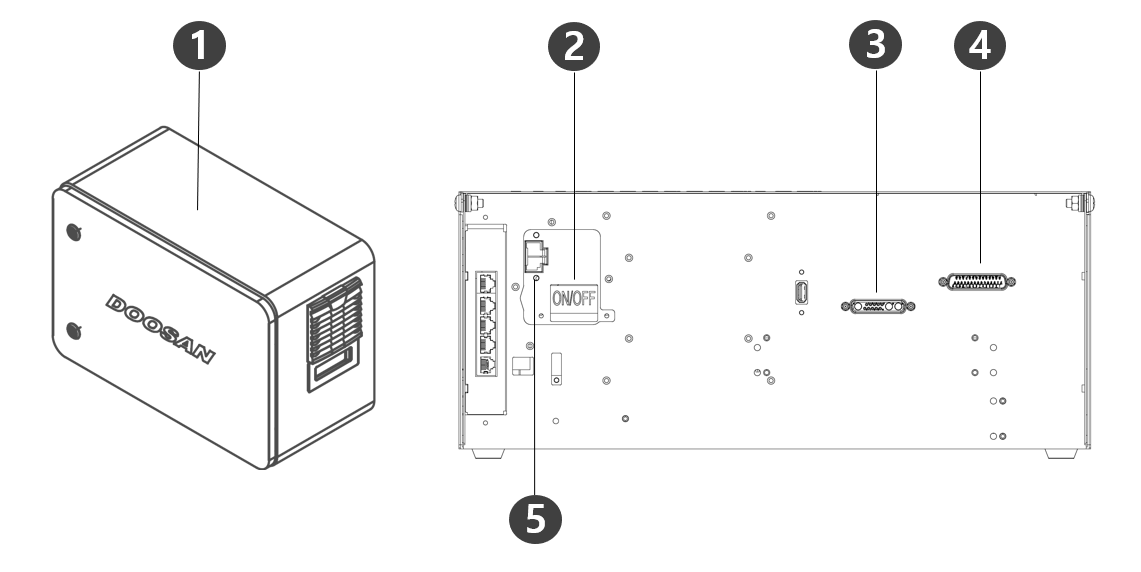
No. | Item | Description |
1 | I/O connection terminal (internal) | Used to connect the controller or peripherals. |
2 | Power switch | Used to turn ON/OFF the main power of the controller . |
3 | Teach pendant cable connection terminal | Used to connect the teach pendant cable to the controller . |
4 | robot cable connection terminal | Used to connect the robot cable to the controller . |
5 | Power connection terminal | Used to connect the controller power supply. |
System Configuration
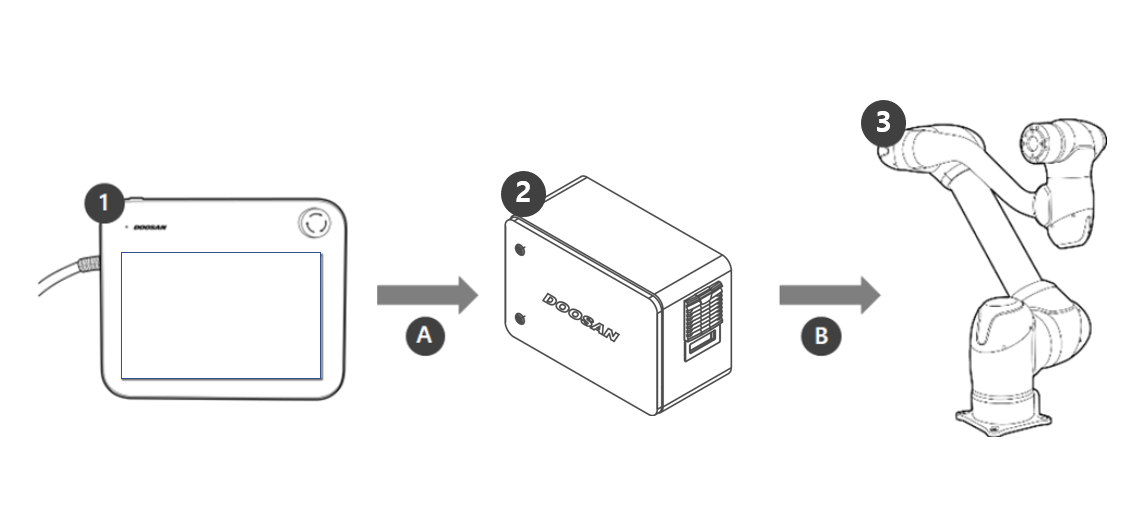
| 1 | Teach pendant | It is a device that manages the overall system, and it is capable of teaching the robot specific poses and setting manipulator and controller related settings. |
| 2 | Controller | It controls the robot’s movement according to the pose or movement set by the teach pendant. It features various I/O ports that allow the connection and use of various equipment and devices. |
| 3 | Manipulator | It is an industrial collaborative robot that can perform transport or assembly tasks with various tools. |
| A | Command/ Monitoring | |
| B | Power Supply/ Network |
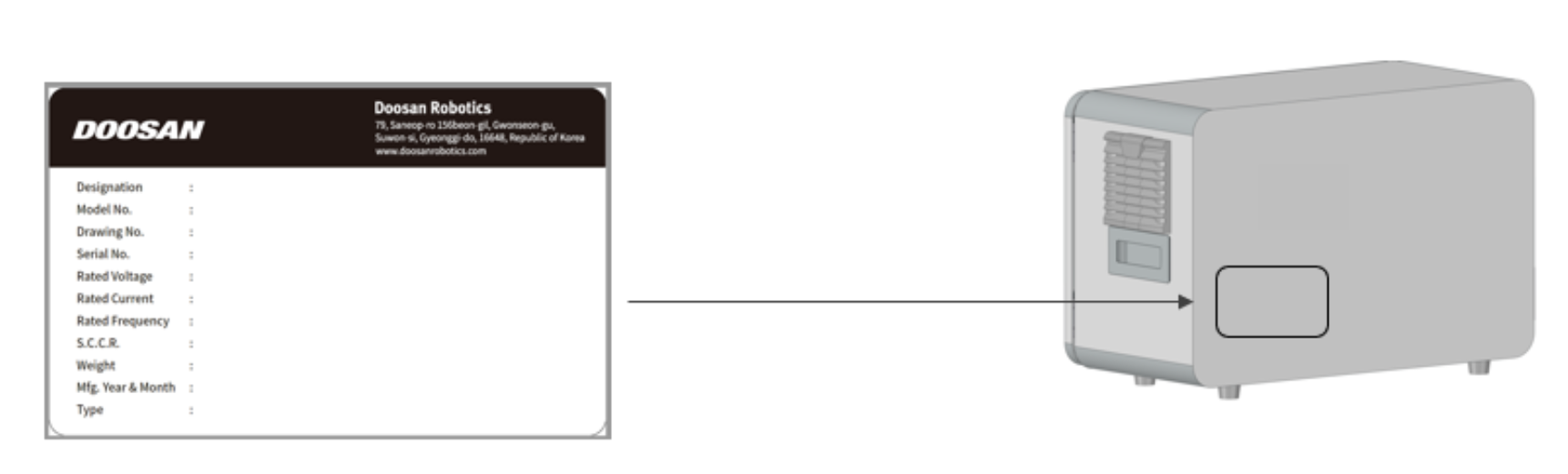
Nameplate and Label