
Setting Coordinates to Move Based on the Tool
To move the robot based on the tool coordinates, follow these steps:
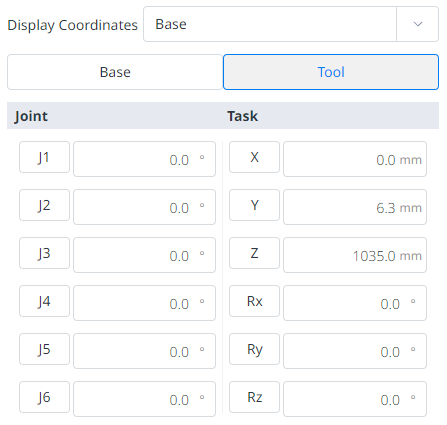
- Select the Move tab and select the Task tab.
- Select the Tool tab.
- Configure the pose to move with reference to the tool.
- Tap and hold the Move to Corresponding Pose button to go to the set coordinates.