Safety I/O Setting
This function inputs/outputs safety-related signals through a redundant terminal. If any signal that is different from the redundant safety input or output signal is detected, the system determines whether it is a short circuit or hardware defect and stops the robot with STO Stop Mode.
- Safety Signal I/O) can be set in Robot Parameters > Safety Settings > Safety I/O.
For more information, see Safety Signal I/O .
Menu Items
| Item | Description | |
|---|---|---|
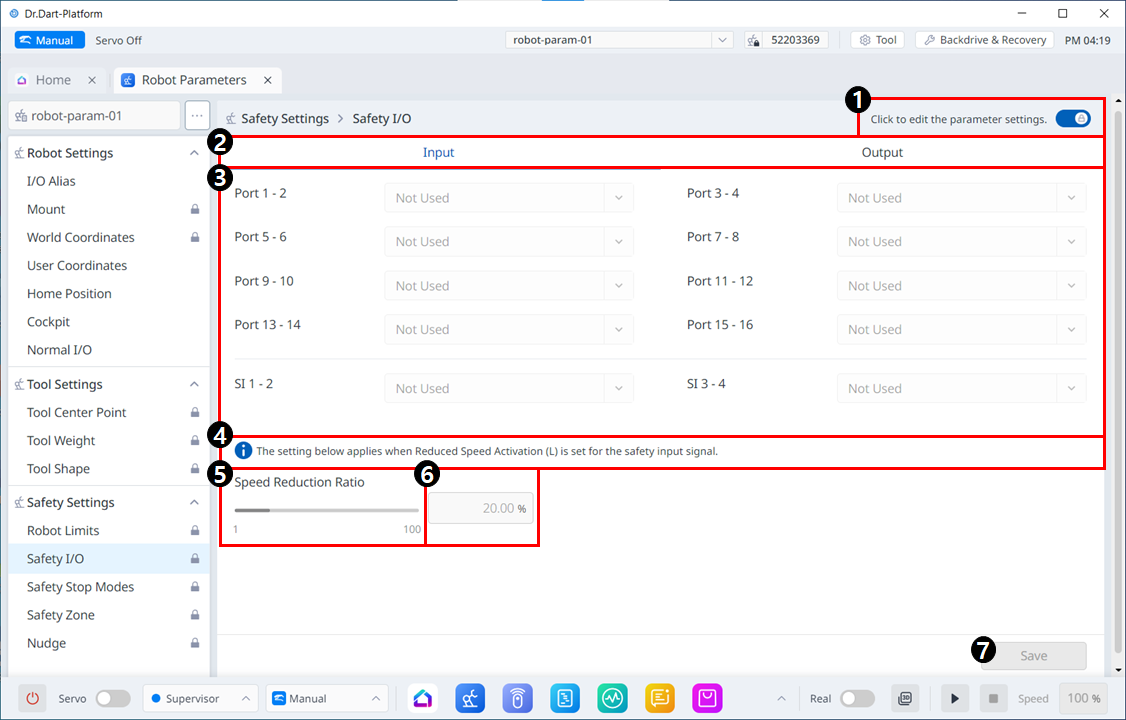
| 1 | Lock Toggle Button | Used to lock the set value. The safety password is required for modifying the set value. |
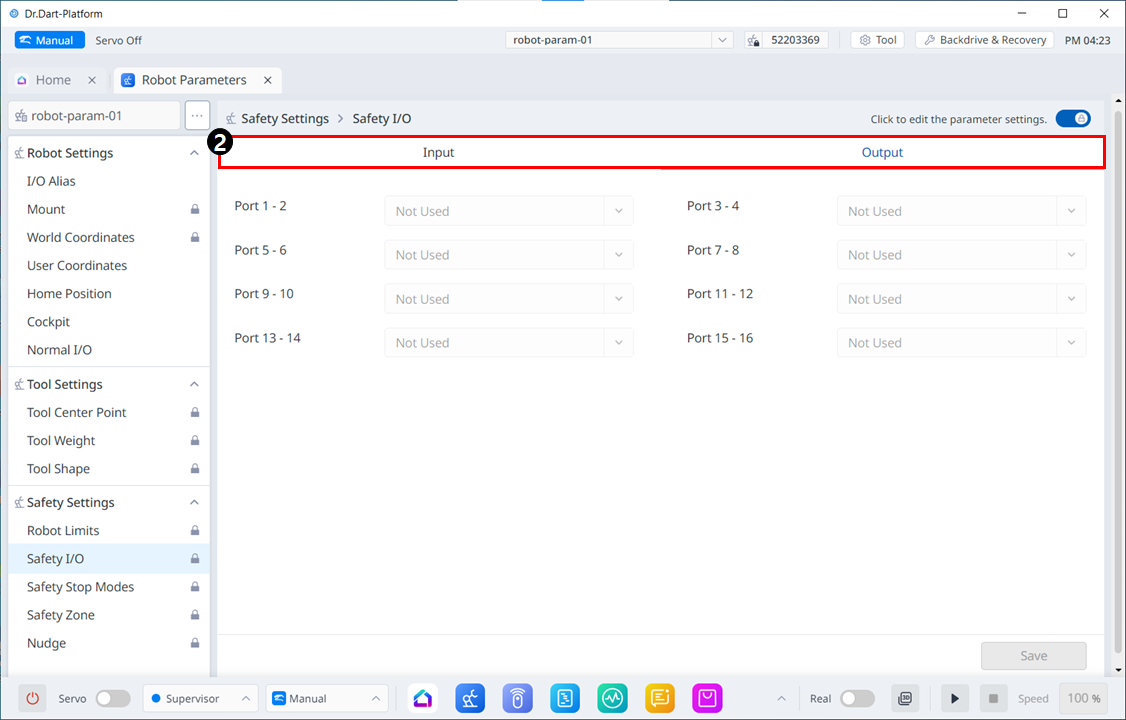
| 2 | Input/Output | Either Input/Output can be selected to be set. |
| 3 | Port list | This is a list of Ports in the corresponding category. The drop-down menus include: Not Used |
| 4 | Caution Message | A note of caution for setting up Safety I/O. |
| 5 | Velocity Reduction Rate Slider | You can use the slider to set the Speed Reduction Ratio. It can be set from 0 to 100. |
| 6 | Velocity Reduction Rate Input | The velocity reduction rate can be directly entered. It can be set from 0 to 100%. |
| 7 | Save | This button allows you to save the setting you entered. |
The Output screen appears as follows, similar to Input.