Execute based on Robot Joint
To adjust the angle based on the robot joint, follow these steps:
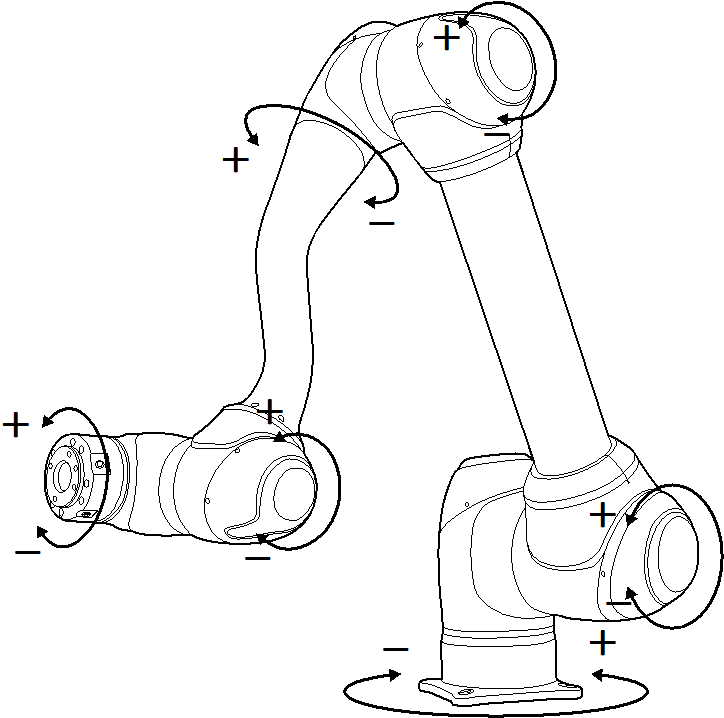
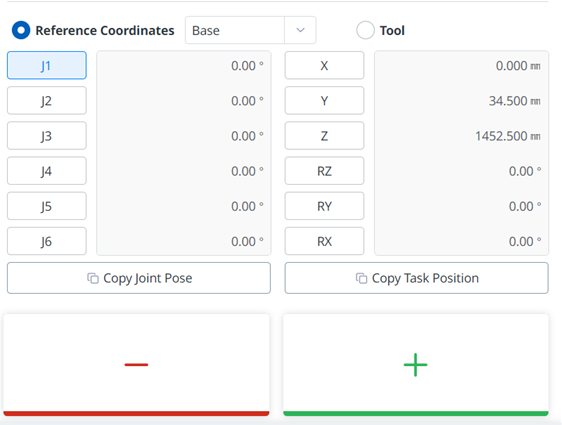
Select the axis (J1-J6) to adjust the angle on the Joint Panel.
- Press and hold the Direction Buttons (