
What is Singularity?
Singularity in a multi-joint robot refers to a position (or point) where the robot has difficulty in calculating its next pose during moving. Multi-joint robots calculate each joint angle during movement based on the robot end.
For example, in Fig. 1 below, when the robot is moving to the red dot, the robot will not be able to determine whether to move its joints to set pose A or pose B as shown in Fig. 2. This position (or point) is called the singularity.
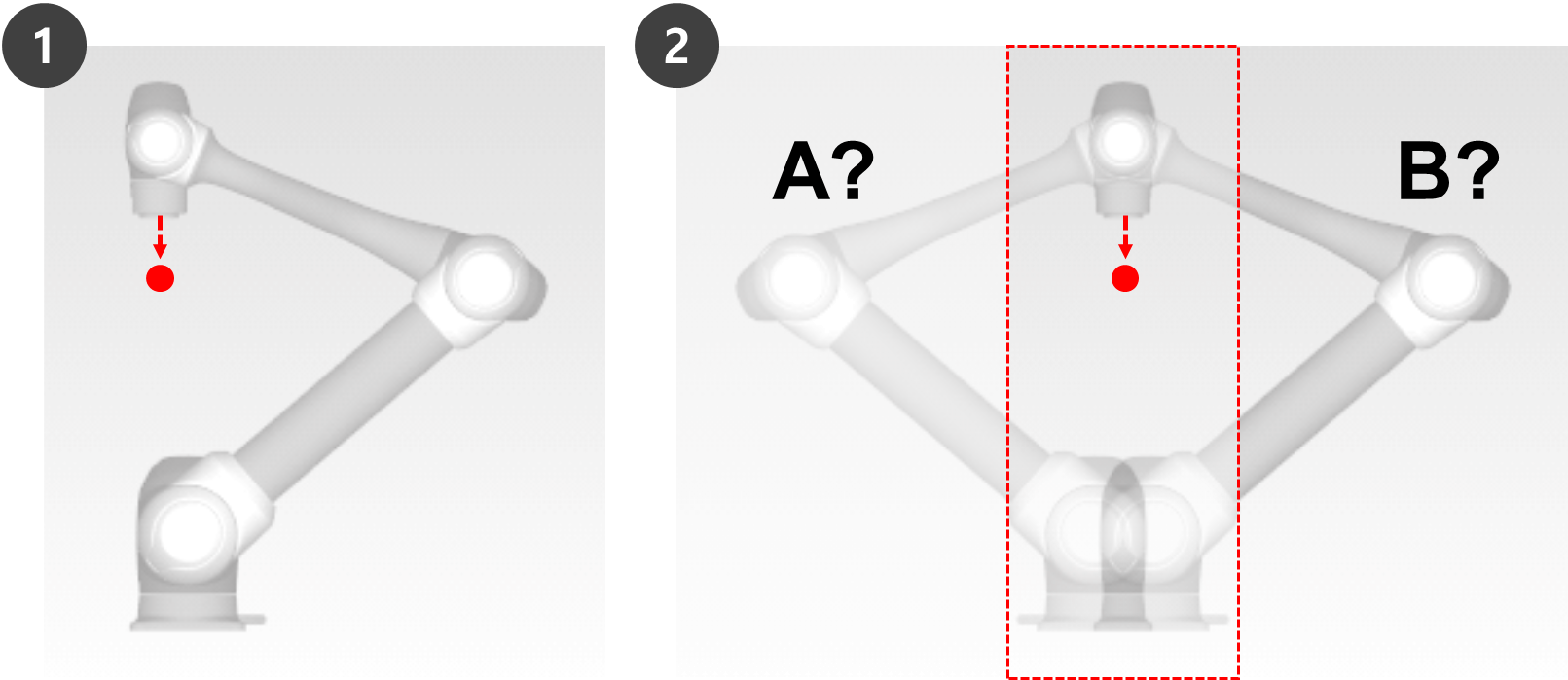
Near a singularity, robot movement is not fluid in terms of plane, point and line, robot end linear movement may not be maintained, and position error during control may increase. Singularity occurs in three cases as shown in the following figure, including when the robot joints form a line.
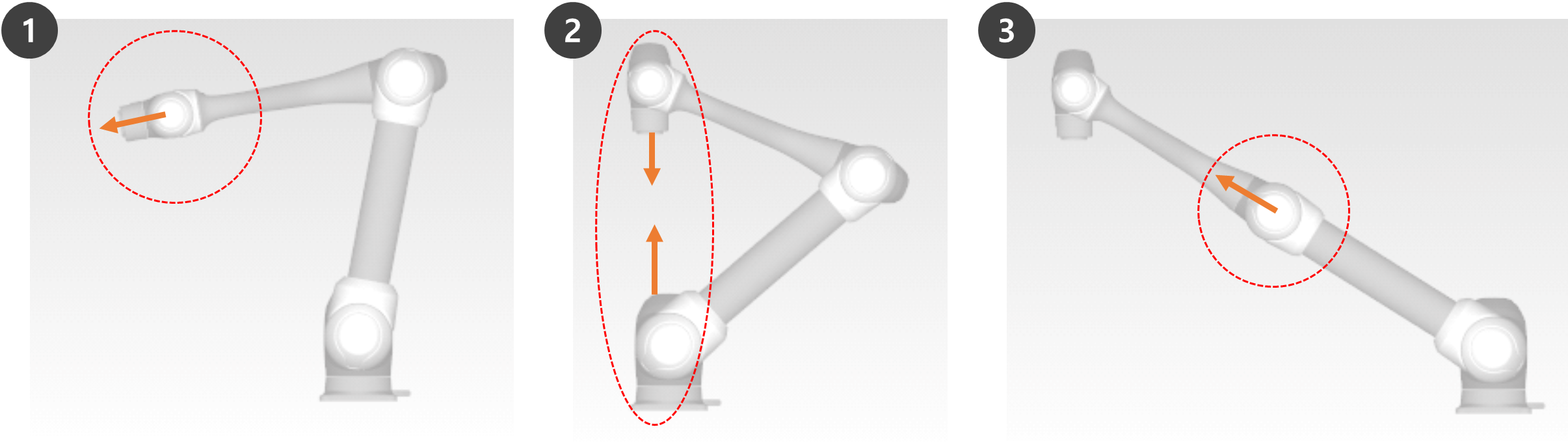
Wrist Singularity: When the robot wrist forms a line as Axis 5 approaches 0º
- When compared to a human arm, Axes 4, 5 and 6 correspond to the wrist joint.
- Shoulder Singularity: When Axes 1 and 6 are on the same line
- When compared to a human arm, Axes 1 and 2 correspond to the shoulder joint.
- Elbow Singularity: When the robot forms a line as Axis 3 approaches 0º
- When compared to a human arm, Axis 3 corresponds to the elbow.
Caution
Manual and automatic operations moving with joint rotation are not influenced by singularity.
- Task movement, MoveL command, etc.
- Singularity only occurs during manual and automatic operation where the robot ends performing linear movement.
- Joint movement, MoveJ commands, etc.
- In the singularity zone, force control or compliance control is unavailable.
- As the rotation speed of certain axes increase rapidly when a linear motion passes a singularity, it is possible for a Joint Speed Limit Violation or Joint Angle Limit Violation to occur.
How to avoid Singularity
Doosan Robotics robots offer options to avoid singularities during motion control. However, it is recommended to configure a task that does not create exceptions using joint movement commands such as MoveJ in singularity zones.