
Workcell Item - Add robot installation pose (Mount)
OPTIONAL EASY 3 MIN
The robot installation pose can be set by adding a robot installation pose (mount) Workcell Item. If the robot is installed on a flat surface, this step can be skipped.
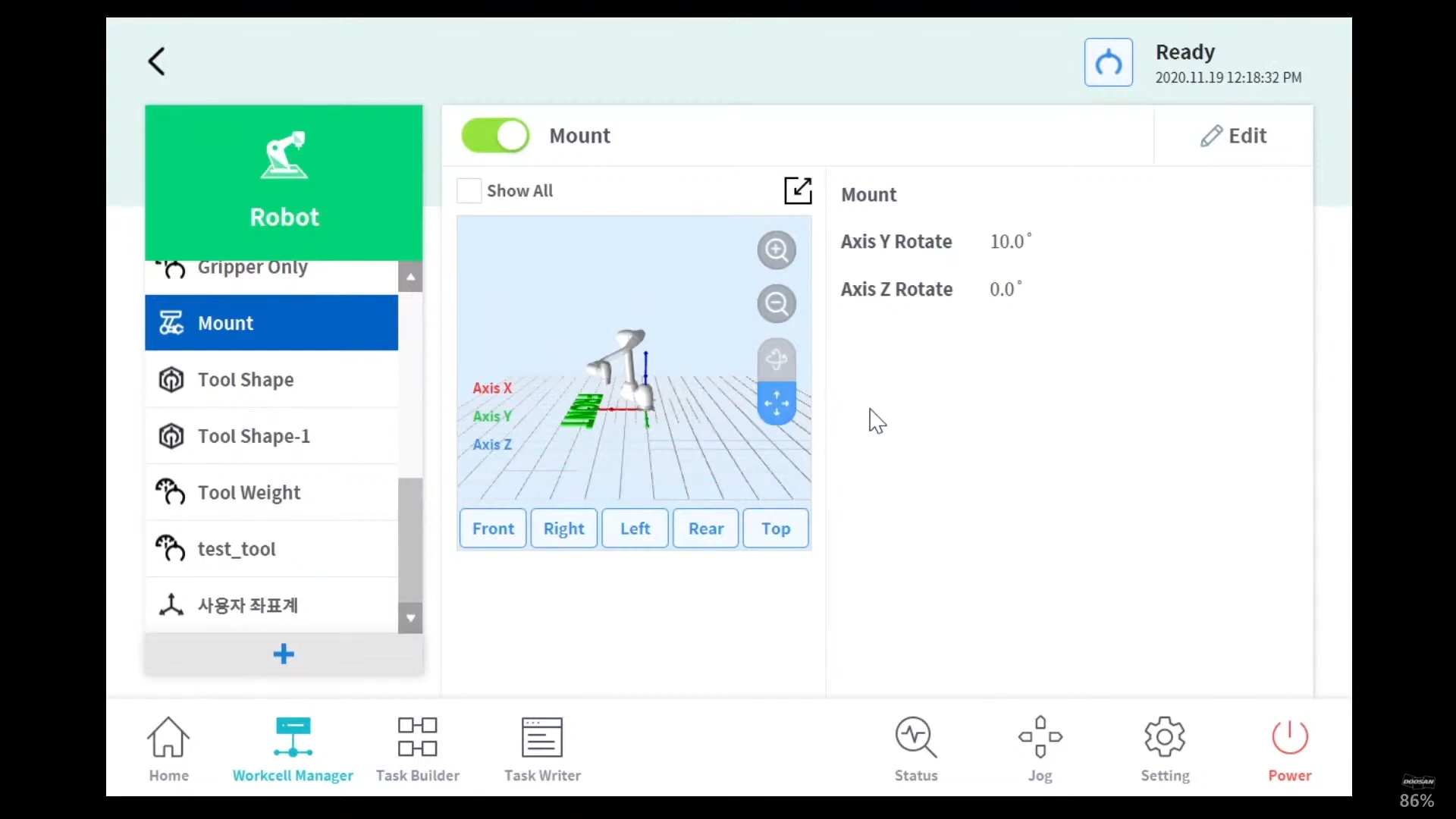
Robot installation pose can be set through Workcell Manager > Robot > 
- The installation angle can be measured using the auto measure function. However, if the angle is less than 5 degrees, auto measure is unavailable.
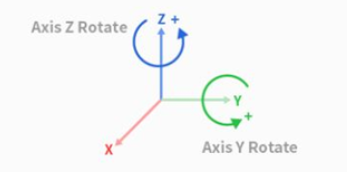
- If the robot is installed on the ceiling or wall, the robot installation angle can be set with Y-axis and Z-axis rotations.
- As auto tool weight calculation is performed based on gravity, it is recommended to reset the tool weight once mount setting is done.
Once the Workcell Item is registered (confirmed), the toggle switch must be enabled in order to use the Workcell Item.
Caution
- When setting the robot installation pose (mount) Workcell Item, it is recommended to change the world coordinates as well. If the world coordinates are not changed, the robot pose on the robot simulator screen of the teach pendant is displayed as the robot being installed on the flat surface (basic).