
Workcell Item - Add End Effector
MANDATORY NORMAL 10 MIN
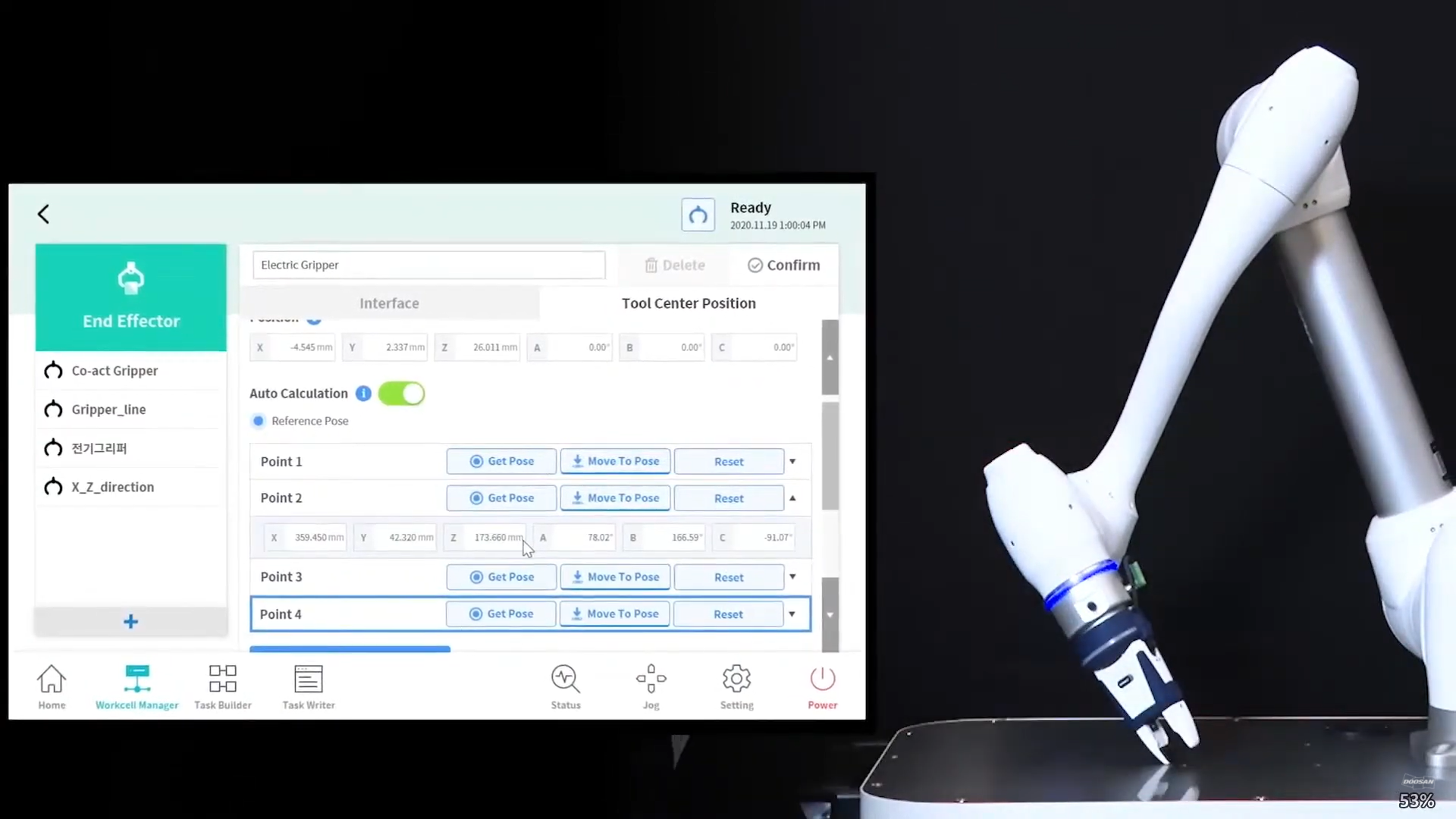
The tool I/O, communication interface, and TCP (Tool Center Point) can be registered by adding an End Effector Workcell Item. The end effector consists of tools and grippers.
The end effector can be set through Workcell Manager > End Effector > 
- Interface: It provides interface setting (analog/digital I/O, communication, etc.) and test functions for tools or grippers
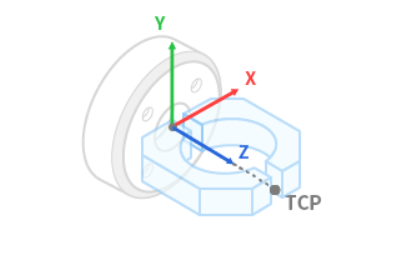
- TCP (Tool Center Point): TCP means the center point of the tool, and the gripper’s end point is generally set as the TCP
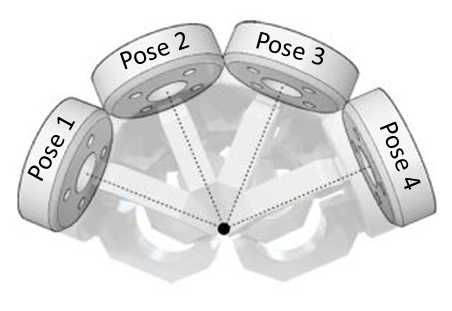
The offset values of the TCP tab can be calculated using the auto calculation function. The TCP offset can be calculated by moving the robot with 4 poses centering the TCP.
Once the Workcell Item is registered (confirmed), the toggle switch must be enabled in order to use the Workcell Item. The activated end effector Workcell Item can be set as the standard TCP (Tool Center Point) by pressing the set tool icon (
- Set of the tool setting is the same as set of Other Commands. Set command can be used when changing the TCP while a task is being performed. For more information, refer to Task Builder Commands and Task Writer Command.
Note
- Up to fifty different end effectors can be registered.
- The Task Builder activates skills based on preset Workcell Items, such as end effectors and peripherals. Processes, such as Pick & Place or Pallet Stocking, can be created conveniently with such skills.