
Waypoint Setting
To configure the waypoint of a command, follow these steps:
- Select the type (Absolute, Relative) of reference coordinate and coordinate value.
- Either use the jog function or perform direct teaching to move the robot to the desired position.
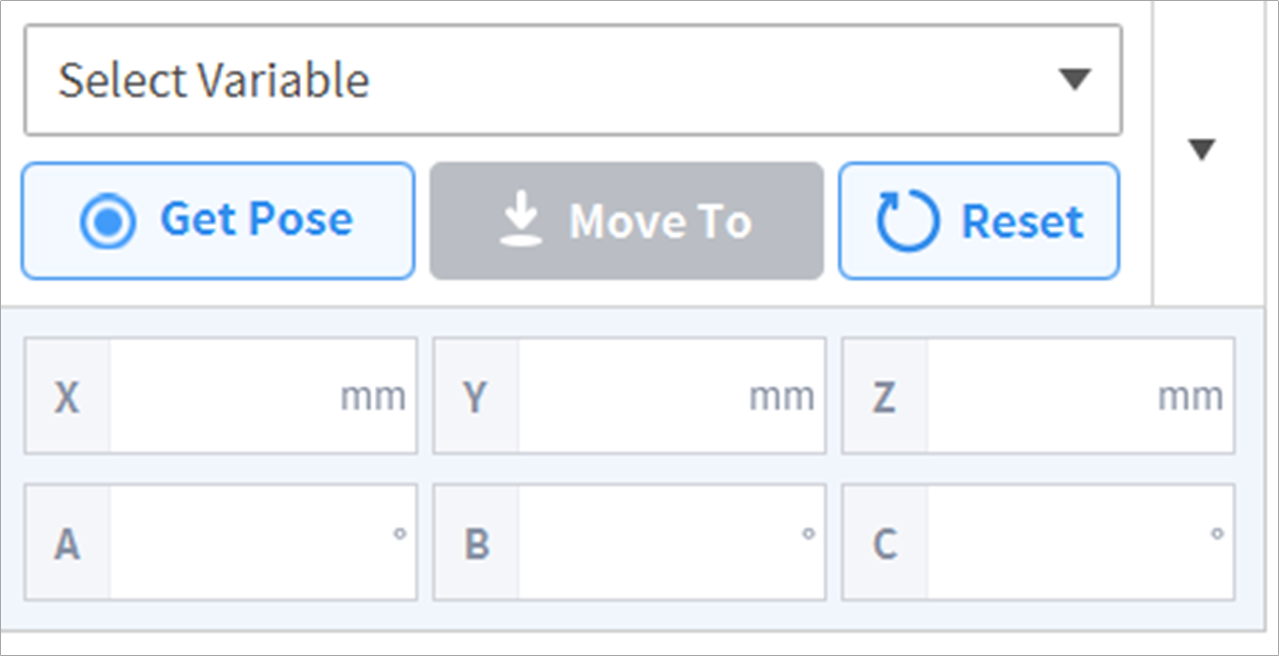
- Tap the Save Pose button to save the robot tool position.
- If necessary, define a variable using GlobalVariables or the Define command.
- If necessary, define a variable using GlobalVariables or the Define command.