Understand robot motion properties
MANDATORY NORMAL 15 MIN
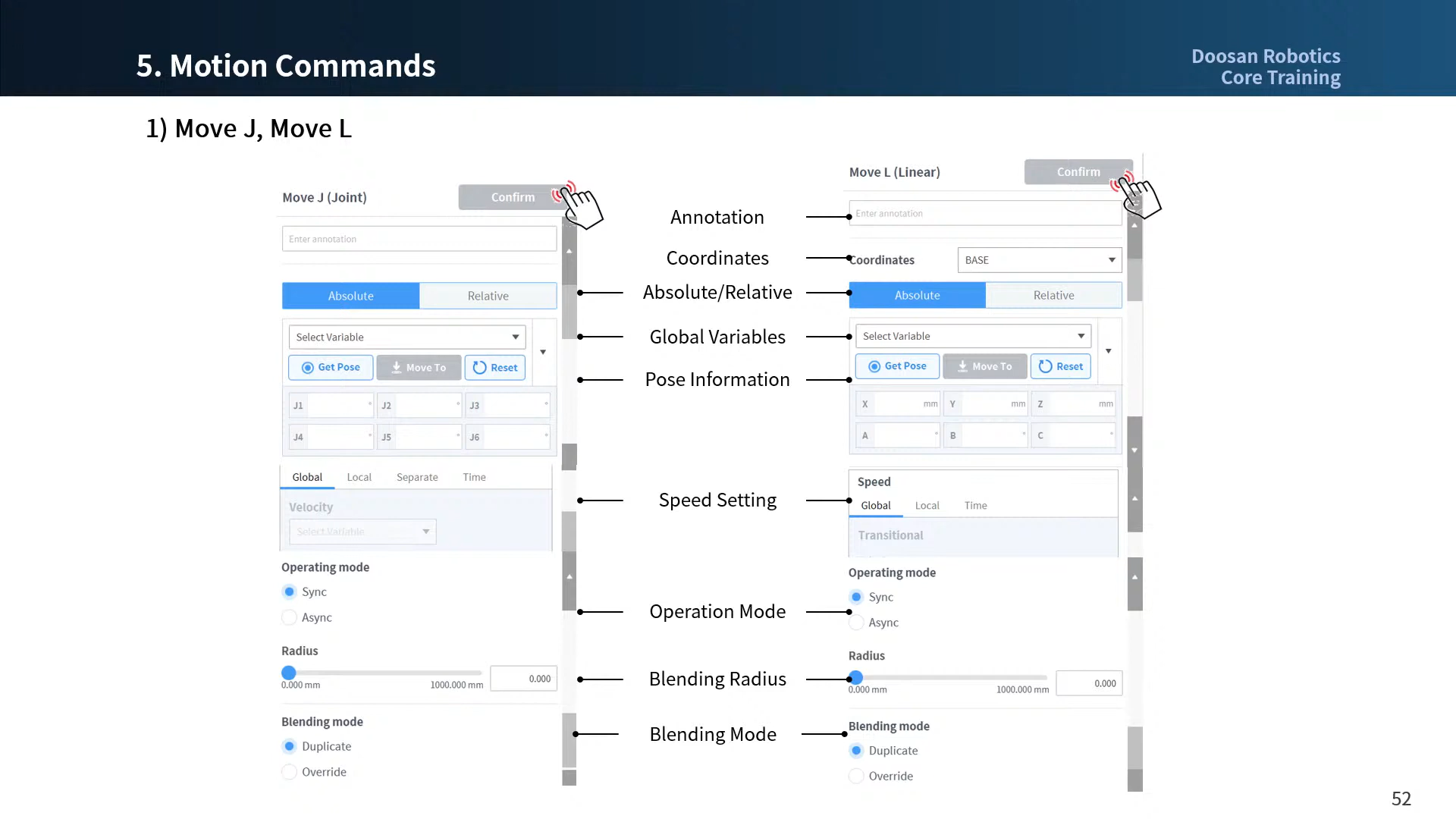
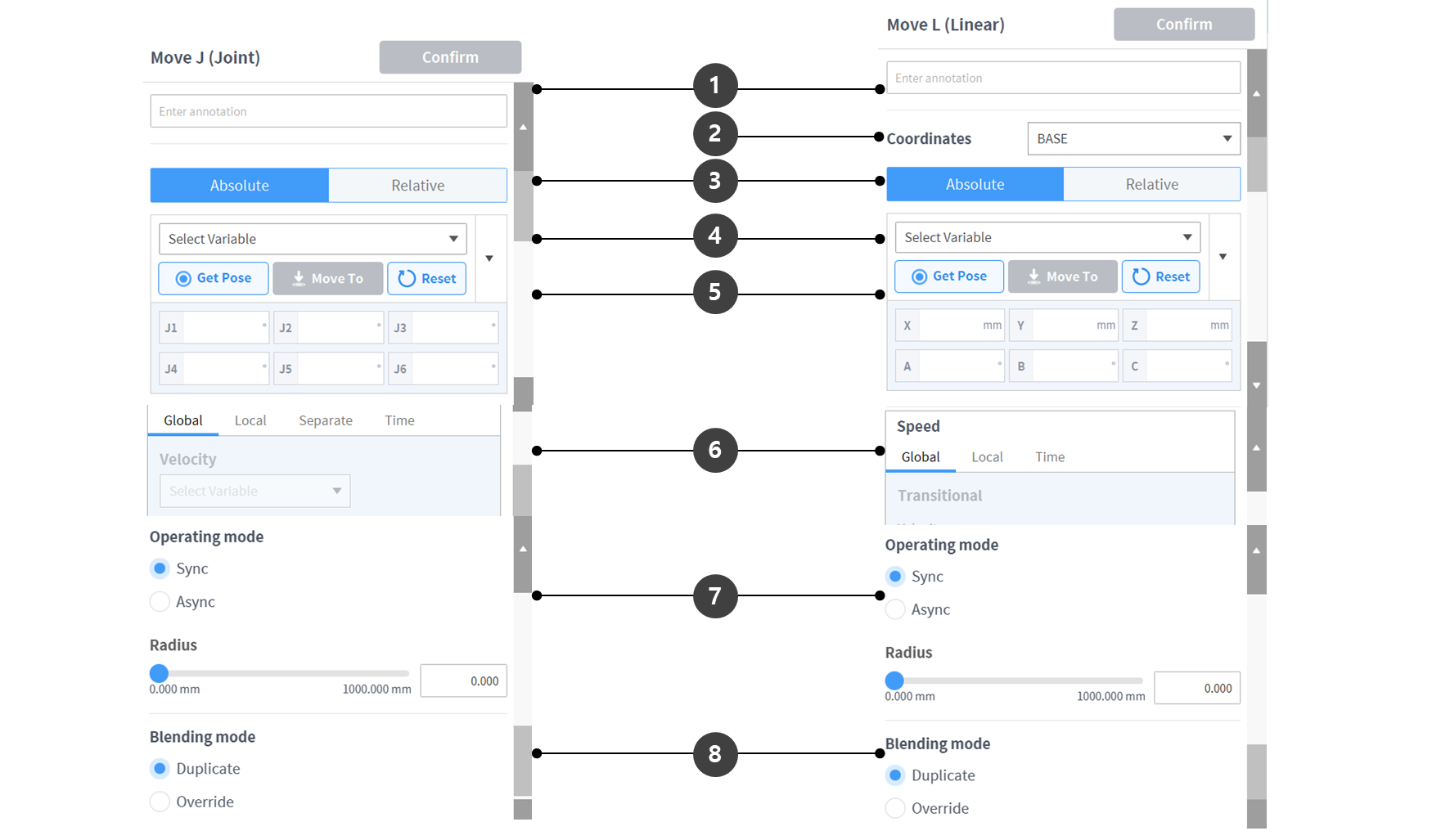
It is the property screen of the standard motions, MoveJ and MoveL commands. Other motions also have similar properties.
- If motion is created with minimum settings, only the pose information (5 in the figure below) needs to be entered.
| Name | Description | |
|---|---|---|
| 1 | Annotation | Description or annotation of the command which can be found in the task window |
| 2 | Coordinates |
|
| 3 | Select move type |
|
| 4 | Select variable | Pose information registered as variables can be selected |
| 5 | Pose information | Pose information is entered
|
| 6 | Speed setting |
|
| 7 | Operation mode |
|
| 8 | Blending mode | The option used to determine whether to ignore or overwrite the preceding motion according to the blending mode of the following motion when the radius is set as an option of the preceding motion |
Operating mode
Sync
You can move to the next command with Sync when the command in progress is completed. It is set as default, and used in general situations.
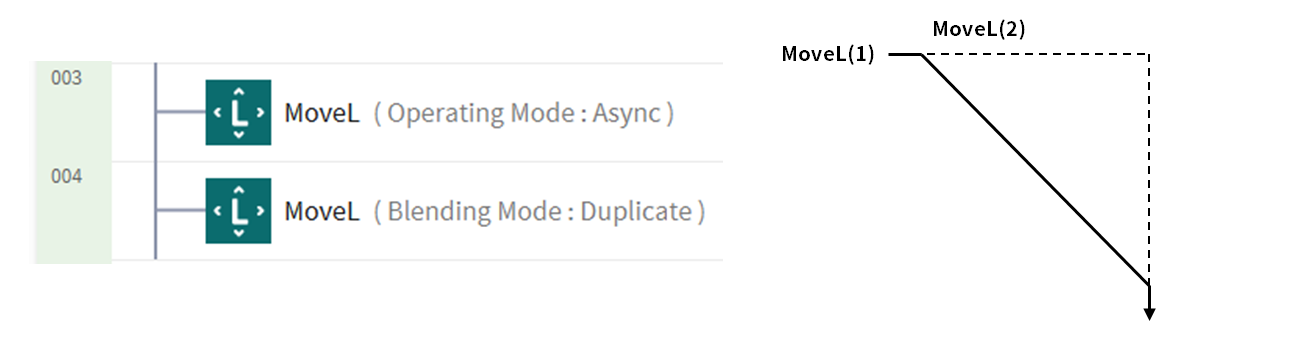
Async
Async starts the next command simultaneously when the motion command begins. It is used to smoothly connect different motions, and it is also used when signal output is turned on/off simultaneously when the motion begins.
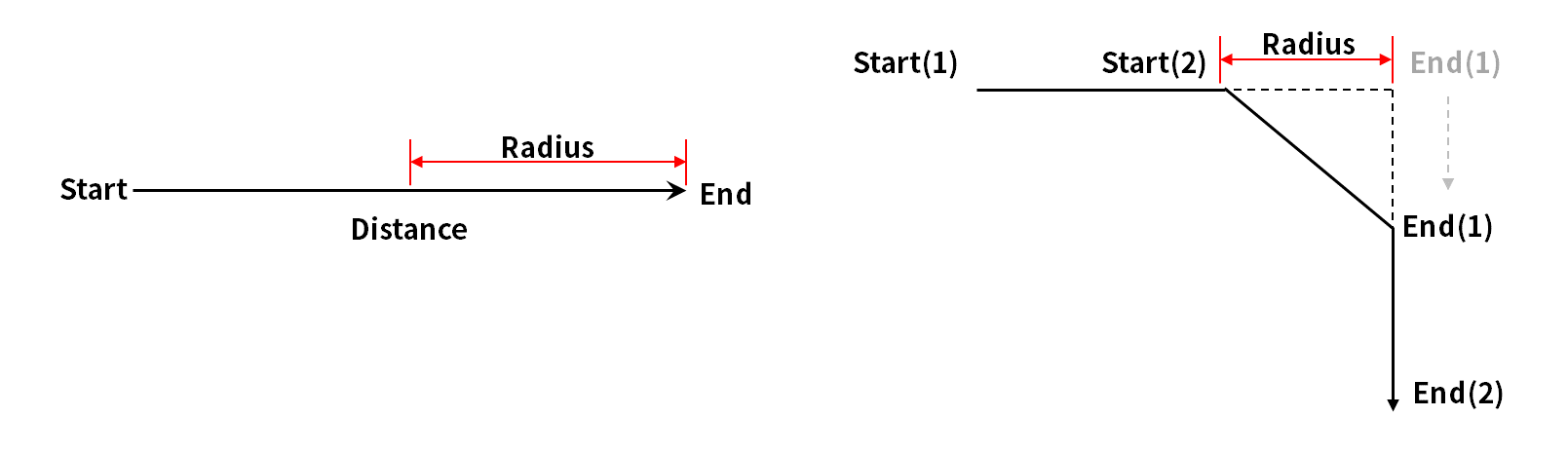
Radius
Radius option activates the async function in the radius section before the motion command reaches its target point. With this option, it is possible to smoothly connect to the next motion command without stopping the current motion command. The radius is set to 0 mm as default.
Caution
Radius option has following characteristics and limits:
- Radius function can only be used in sync mode.
- Conditions and calculations can be performed in the async section within the radius.
- Radius cannot exceed 1/2 of the total distance between the current and target location before the motion is executed.
- ex. If the movement distance is 100 mm, the maximum radius available is 50 mm.
- Motion commands which cannot apply Blending between motions are as follows: Blending is already applied in these commands, so applying radius to these commands and executing them causes errors. Utilizing commands, such as WaitMotion and StopMotion, can help avoid errors.
- MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
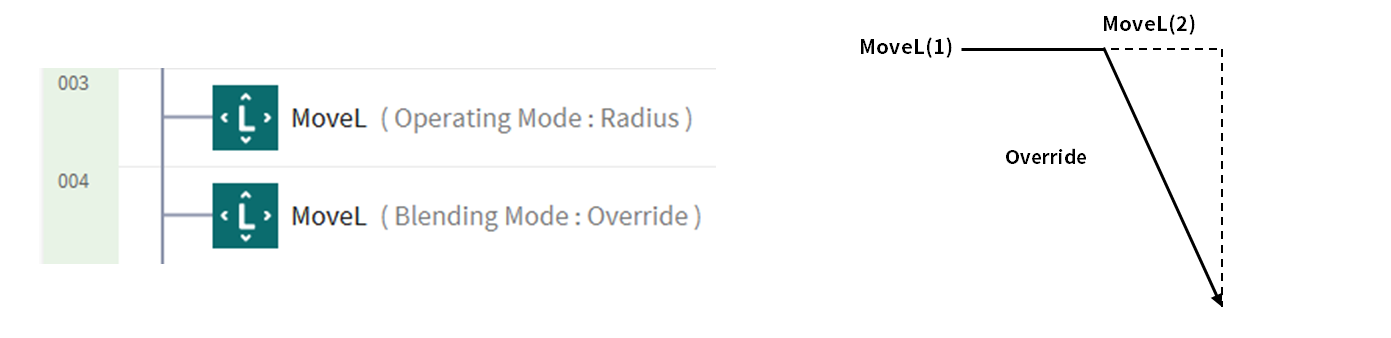
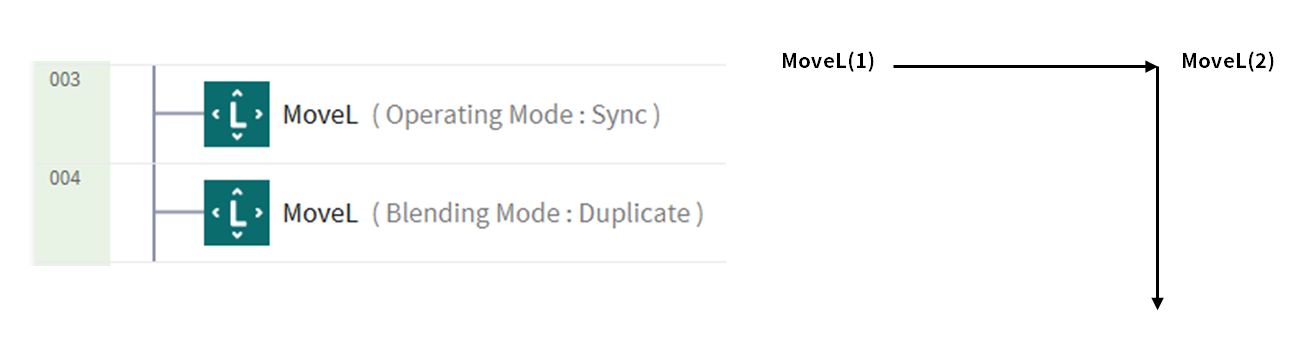
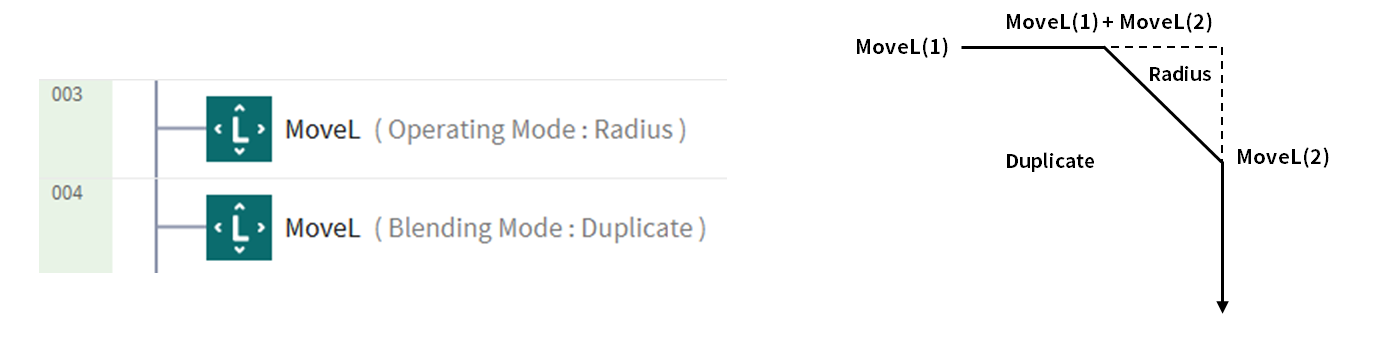
Blending mode
It is the option used to determine whether to ignore or overwrite the preceding motion according to the blending mode of the following motion when the radius is set as an option of the preceding motion.
Duplicate
Duplicate is a mode that maintains the preceding motion to allow the following motion to overlap with the preceding motion.
Override
Override ignores and overwrites the preceding motion to execute the following motion.