
Status window
To check or test the I/O information, tap the Status button in the main menu.
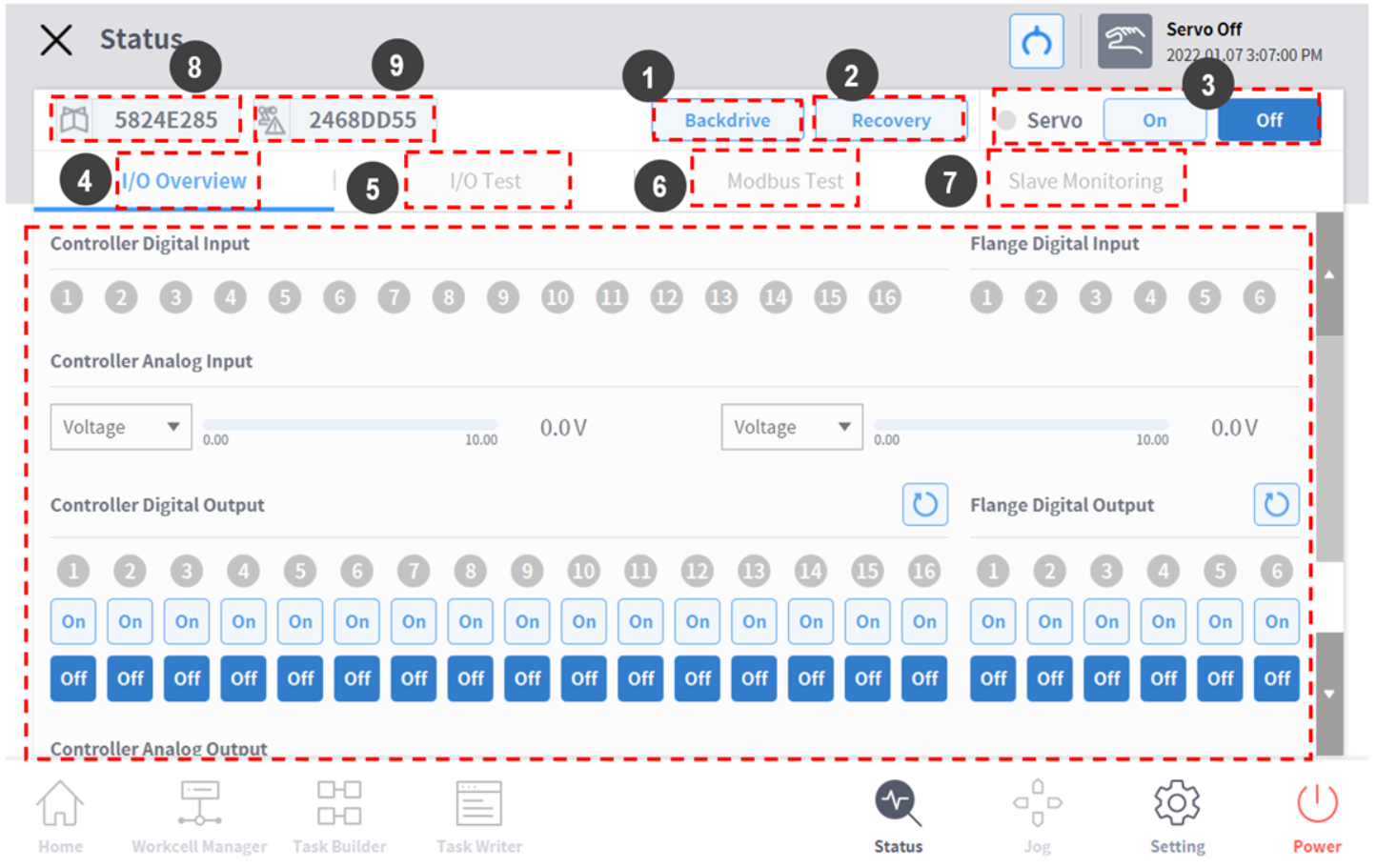
The Status window allows you to check the I/O information of devices connected to the controller and flange, and the Backdrive mode and Safety Recovery function can be executed.
The Status window is a popup window, so it is possible to tap the Status button on the Home, Task Builder or Task Writer screen even during Auto mode to check I/O information. The output test cannot be performed during Auto mode.
No. | Item | Description |
|---|---|---|
1 | Backdrive | If the robot is stopped due to an abnormality during operation, the user can cut the power to each joint and move the joint to the desired position manually to recover the normal operation status. |
2 | Safety Recovery | Sets the robot angle and position when setting the robot in software recovery mode and packaging mode. |
3 | Servo On | Supplies the driving power that moves each joint of the robot. |
4 | I/O | Manages the digital and analog I/O status of the controller and flange. |
5 | I/O Test | Checks and tests the digital and analog I/O devices of the controller and flange used by the task. |
6 | Modbus Test | Tests the signals of the set Modbus device. |
| 7 | Slave Mornitoring | Monitors all slave functions provided by Industrial Ethernet Slave (PROFINET, EtherNet/IP, Modbus). |
8 | Job Space Status Value | Displays encryption of the entire job space data registered to check whether the job space setup has been modified. |
9 | Safety Setup Status Value | Displays encryption of the entire safety data registered to check whether the safety setup has been modified. |