
Robot Setting - Set World Coordinates
OPTIONAL NORMAL 3 MIN
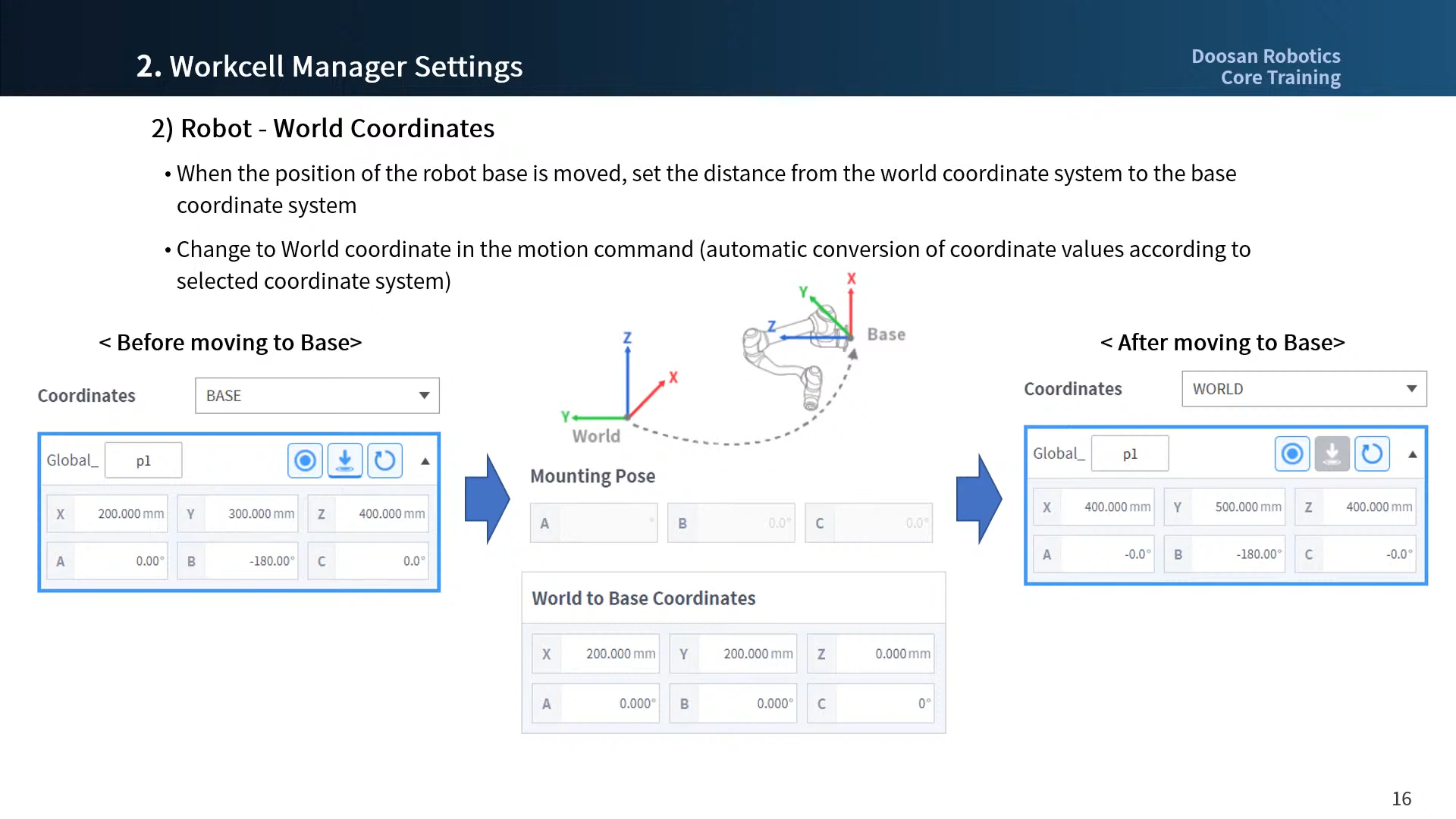
The world coordinates of the robot can be set from World Coordinates. In case the robot coordinate is the base coordinates, this step can be skipped.
World coordinates can be set through Workcell Manager > Robot > World Coordinates. For more information, refer to Set World Coordinates.
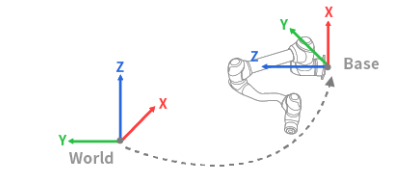
- World coordinates are used when the robot base installation location is physically moved/rotated.
- Changing the world coordinates will apply the same move/rotation to the robot simulator screen.
Note
World coordinates can also be used even after the base location and angle are changed after robot teaching. If the coordinates of tasks created through robot teaching in the past are changed from BASE to WORLD, an offset corresponding to the move/rotation of world coordinates is applied to all motion coordinates.