Remote Control Setting
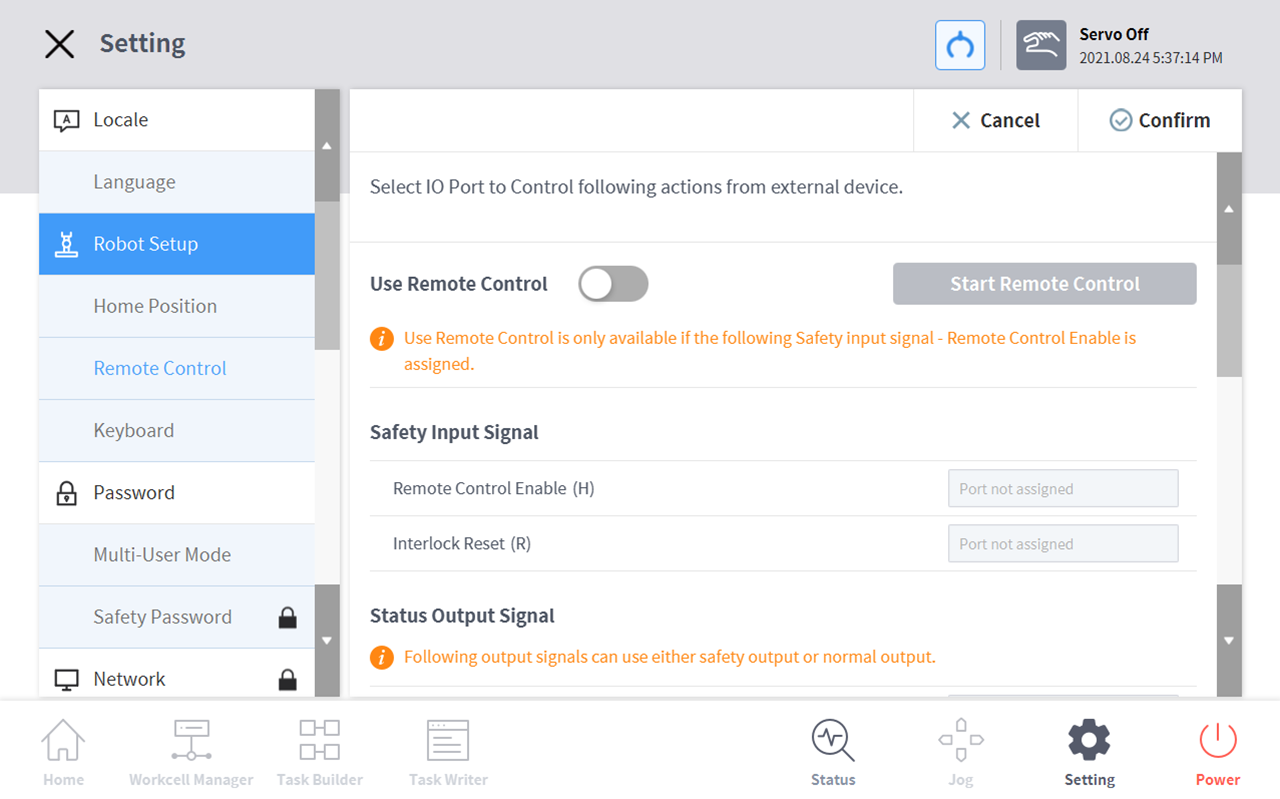
- Select the Remote Control menu in the Setting > Robot Setup menu.
- The current setting information is displayed in the setting management window.
- Set the Use Remote Control button to ON.
- If the system is restarted with remote control set to ON, it boots up in remote control mode.
- Enter the output signal, input signal and default load task values.
- If the input signal is not set, settings cannot be made. In the Workcell Manager > Safety I/O > Input tab, Edit > Select Port > Configure Remote Control Enable(H).
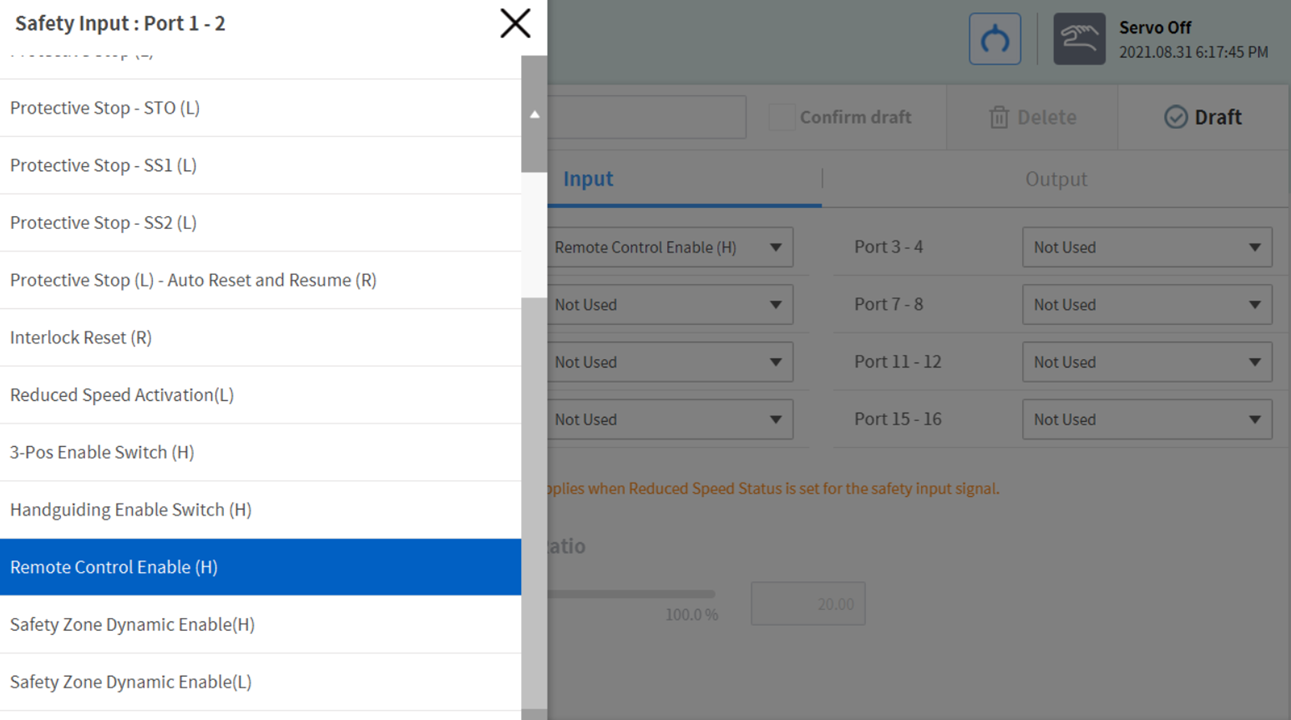
- If the input signal is not set, settings cannot be made. In the Workcell Manager > Safety I/O > Input tab, Edit > Select Port > Configure Remote Control Enable(H).
- Tap the Confirm button when complete.
- This completes the environment settings for remote control.
- To allow remote control using an external device, tap the Start Remote Control button to engage remote control mode.
- Information on tasks to execute from the external device appears.
- Motion inputs from the external device can only be executed if a green signal is displayed on the “Enable Remote Control” button.
- If a red signal is displayed on the Enable Remote Control button, input an enable signal from the external device.
Note
- If the Emergency Stop or Protective Stop occurs in Remote Control Mode, it is handled as follows:
- Emergency Stop: An emergency stop popup is displayed. After removing the cause of emergency stop - pulling or twist the emergency stop switch for reset, the popup closes automatically.
- Protective Stop causing the transition to Servo Off state: A red protective stop popup is displayed. If Servo On signal is entered after removing the cause of protective stop, the robot servo drives turn on and the popup closes automatically.
- Protective Stop causing the transition to Interrupted state: A yellow protective stop popup is displayed. If Interlock Reset signal is entered after removing the cause of protective stop, the robot state chages to normal standby state – Manual Standby, Auto Standby, or HGC standby. For the safety violations where the cause of them cannot be removed without moving the robot, Clamping Escape by cockpit can be used.
- For details on status for each mode, please refer to “ Status and Flange LED Color for Each Mode”.
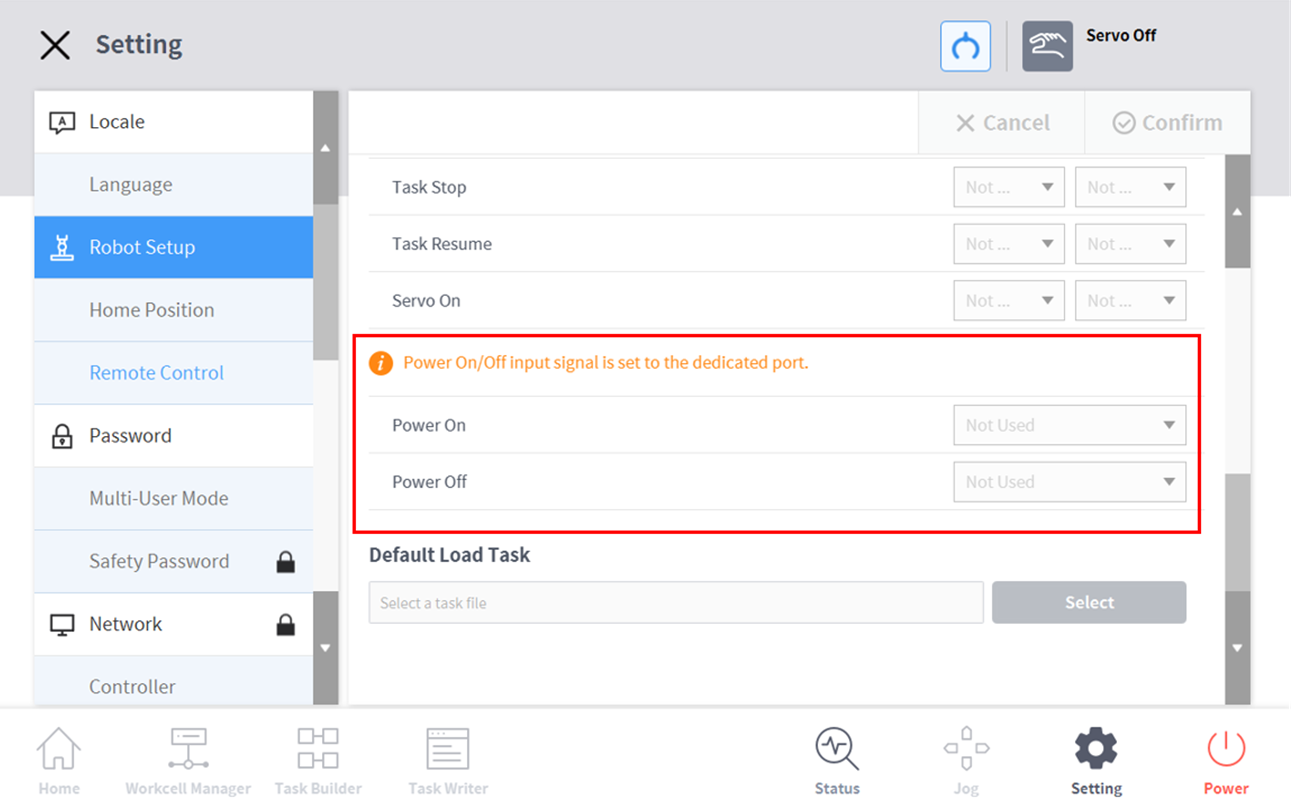
- It is possible to turn ON/OFF the power of the robot by remote control setting
- Tap the Settings button of the main menu and select Remote Control under Robot Settings.
- Select the dedicated input port for remote control to use Power On or Power Off function.