
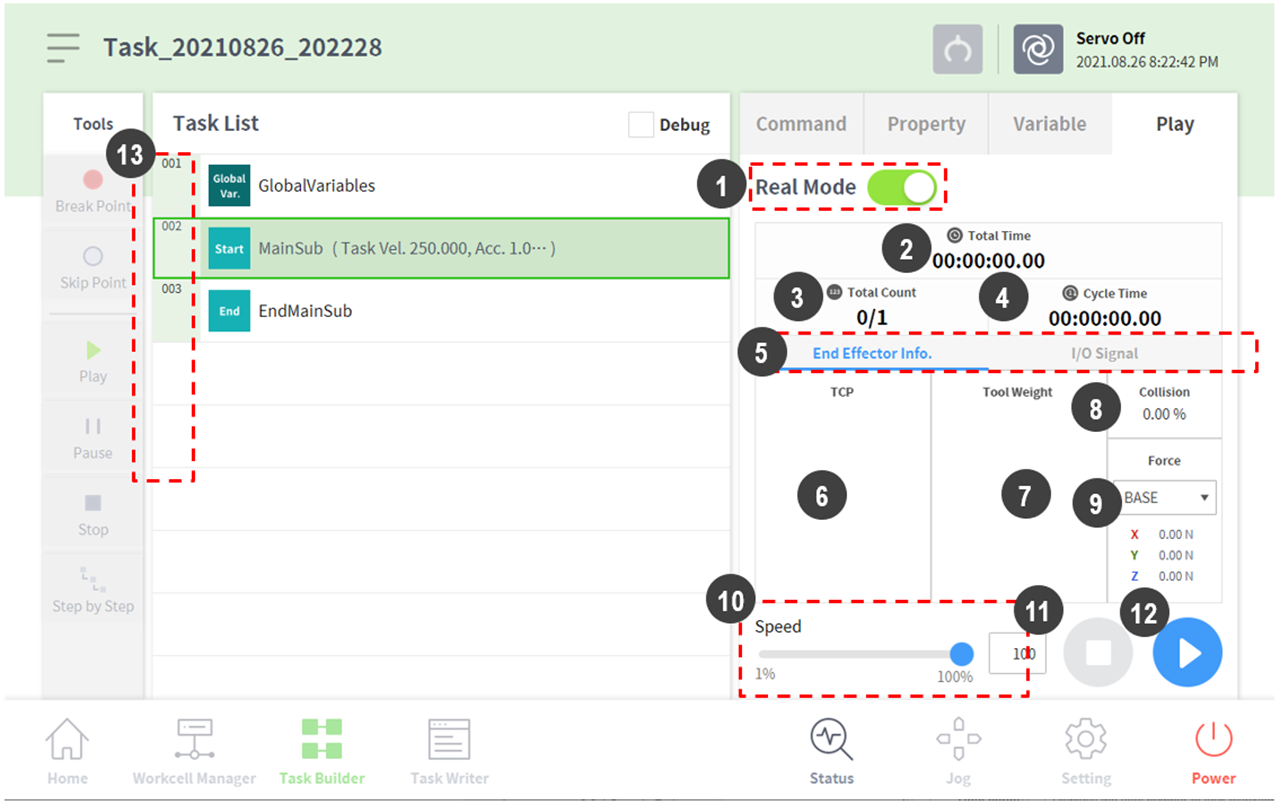
Real Mode Screen: End Effector Information tab
The real mode screen end effector information tab of Task Builder is structured as follows:
No. | Item | Description |
1 | Real Mode ( | Sets the robot test play mode.
|
2 | Total time | Displays the total time elapsed after the task execution. |
3 | Total count | Displays the total number of task executions. |
4 | Average execution time | Displays the average time spent to execute one cycle of the task in the task list. |
5 | Information Screen Shift Tab | You can switch between the robot information message screen, end-effector information screen, and input/output information screen.
|
6 | Tool center point information area | Displays the tool center point information configured through the tool center point and weight configuration functions of the set TCP command or the jog. |
7 | Tool weight information | Displays the tool weight information configured through the tool center point and weight configuration functions of the set TCP command or the jog. |
8 | Collision information area | Displays the collision sensitivity value set for the area where the robot is currently positioned. |
9 | Force information area | It displays the force information occurring in the Base, World, User, and Reference coordinate systems. The Reference coordinate system displays force based on the coordinate system information applied to the robot. |
10 | Speed slider | It sets the speed of the robot in a real or a virtual mode. |
11 | Stop button | It stops the current task. |
12 | Execute/pause toggle button | It executes or pauses the work in the task list. |
13 | Time | It displays the time spent on the corresponding command/skill. |

Caution
- Before executing a task, execute the task in virtual mode to check whether the task operates as intended.
- It is recommended to test the robot program by designating temporary waypoints outside another machine’s work space. Doosan Robotics is not responsible for damages that occur due to programming error or robot malfunctioning, as well as damage to the equipment.
The emergency stop button is located on the teach pendant. In an emergency situation, press the emergency stop button to stop the robot.
In the case of models without Force Toque Sensor, the force (X, Y, Z) values are not monitored.