
Connect wires
MANDATORY NORMAL 10 MIN
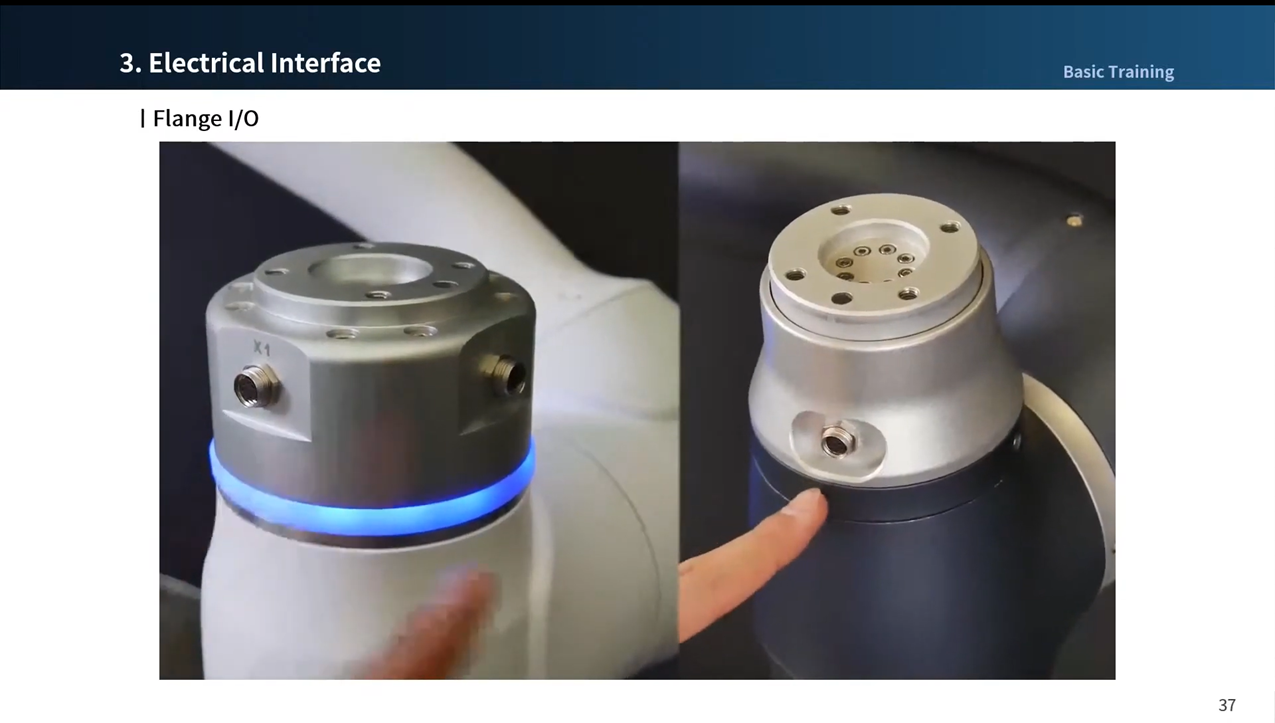
Connect the necessary cables to the flange I/O connectors after the tool is secured. The pin map of the flange I/O must be checked.
- When power is supplied to the robot, the fifth terminal of each connector always outputs 24V.
- For more information, refer to Flange I/O.
Caution
- Make sure to cut off the robot’s power when connecting the tool and gripper.
- Make sure to configure tool and gripper measures to prevent workpieces falling from the tool when the robot power is cut off.
In case of the A Series, the 24V flange I/O power is cut off when the robot is set to Servo Off. Therefore, make sure to configure tool or gripper measures to prevent dangerous situations when handling the workpiece from the tool (set in Normal Close status).
Note
To control/monitor the robot using an external device, connect the controller I/O or connect to a network, such as Modbus TCP, PROFITNET or EtherNet/IP.
- For more information, refer to Connecting Controller I/O.
- For more information, refer to Network Connection.