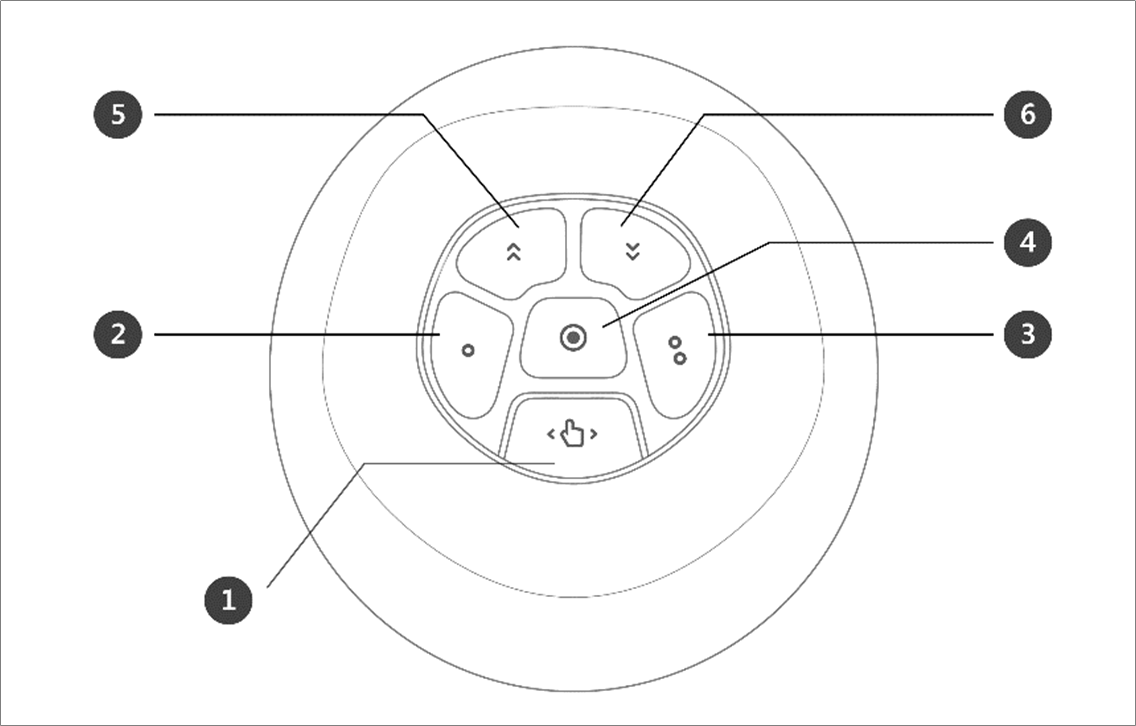
Moves the Focus displayed on the screen one line up
6
One Line Down
Moves the Focus displayed on the screen one line down
Note – Cockpit Setting Change
The hand-guiding button constraints motion button settings require 2 seconds to be modified..
Pressing the Save Pose button on the Skill Setting screen will automatically move the focus to the next pose.
The cancel button can only be used in the Skill Setting window that manages multi-poses.
Caution
A Series models without FTS (A0509, A0912) cannot use fixed motion.
A Series models with FTS (A0509S, A0912S) are capable of using fixed motion
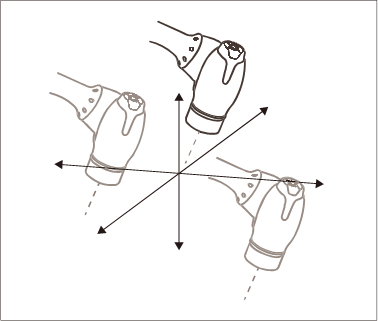
Fixed motion relies on the FTS attached to the tip of the robot; therefore, it is essential to attach the tool and for the robot to grip it as it moves. Moving the robot while holding the body may not trigger a reaction from the robot.