
Connecting Controller I/O
In addition to the manipulator and teach pendant, various external equipment can be connected to the controller through the controller I/O terminal. Various peripherals such as safety devices, including emergency stop switch, light curtain and safety mats, and devices required during robot work cell setup including pneumatic solenoid valves, relays, PLCs and conveyor belt encoders can be connected.
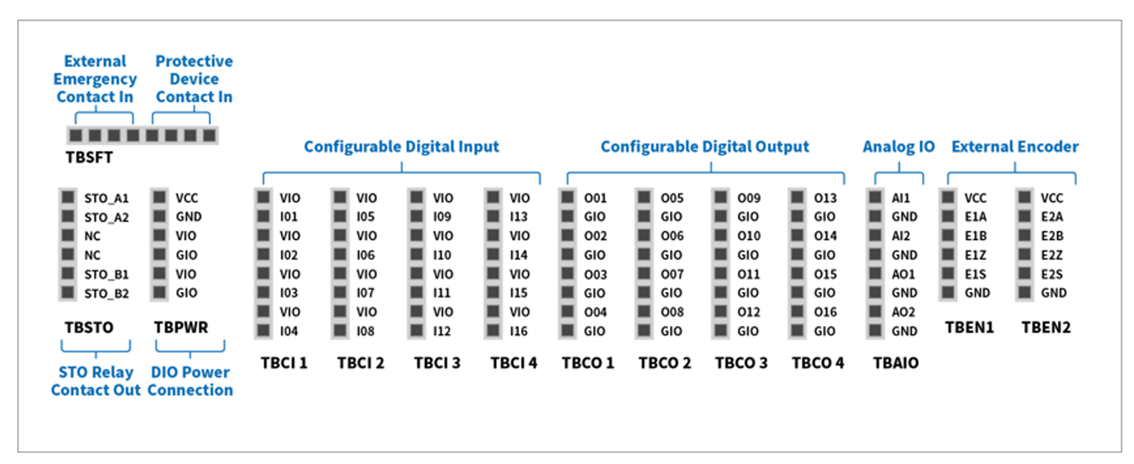
The controller I/O consists of the following six units:
- Terminal Block for Safety Contact Input (TBSFT): Used to connect devices required for emergency stopping and protective stopping
- Terminal Block for Digital I/O Power (TBPWR)
- Configurable Digital IO Block (TBCI1- 4, TBCO1– 4): Used to connect peripherals required for robot operation
- Terminal Block for Analog I/O (TBAIO)
- Terminal Block for Encoder Input (TBEN1, TBEN2)
- Terminal Block for Safety Contact Output (TBSTO): It is connected to the power supply line of the robot peripheral device. When the robot changes to STO state, it is also used for stopping by cutting off the supply power to peripheral devices.
Caution
- Turn off the power when connecting terminals to the controller I/O to prevent product damage and breakdown.
- Doosan Robotics will not compensate any product damage caused by inappropriate terminal connection or user negligence.
- Make sure to turn off the external power source when turning off the controller power