
Names and Functions
Manipulator
Names of Parts
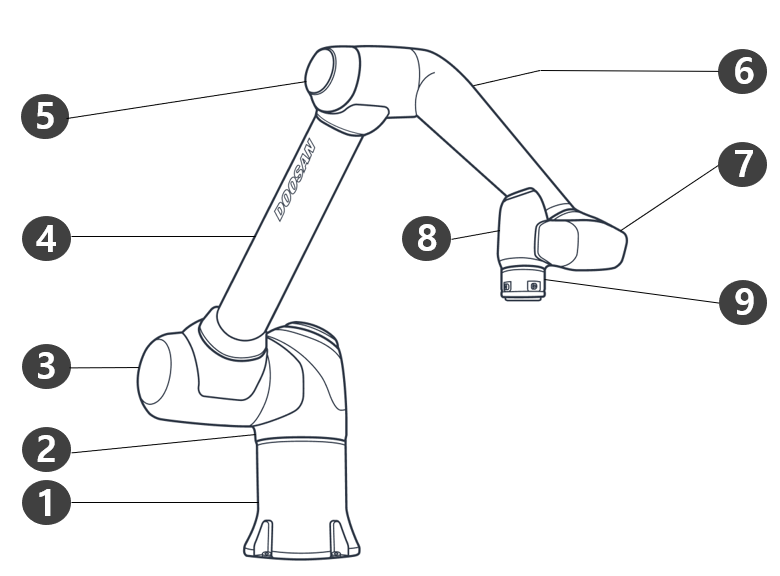
No. | Name | No. | Name |
|---|---|---|---|
1 | Base | 6 | Link2 |
2 | J1 | 7 | J5 |
3 | J2 | 8 | J6 |
4 | Link1 | 9 | Tool Flange |
5 | J3 | 10 |
Key Features
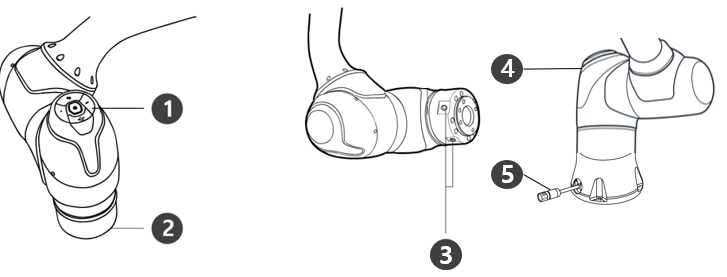
No. | Item | Description |
|---|---|---|
1 | Cockpit | [Option] Controller used for direct teaching and operation. |
2 | Tool Flange | Area to install tools. |
3 | Flange I/O | I/O port for tool control. (Digital input 3ch, output 3ch) |
4 | LED | Displays the robot state with different colors. For more information about robot state, refer to the Status and Flange LED Color for Each Mode |
5 | Connector | Used for supplying power to and communication of the robot. |
Controller
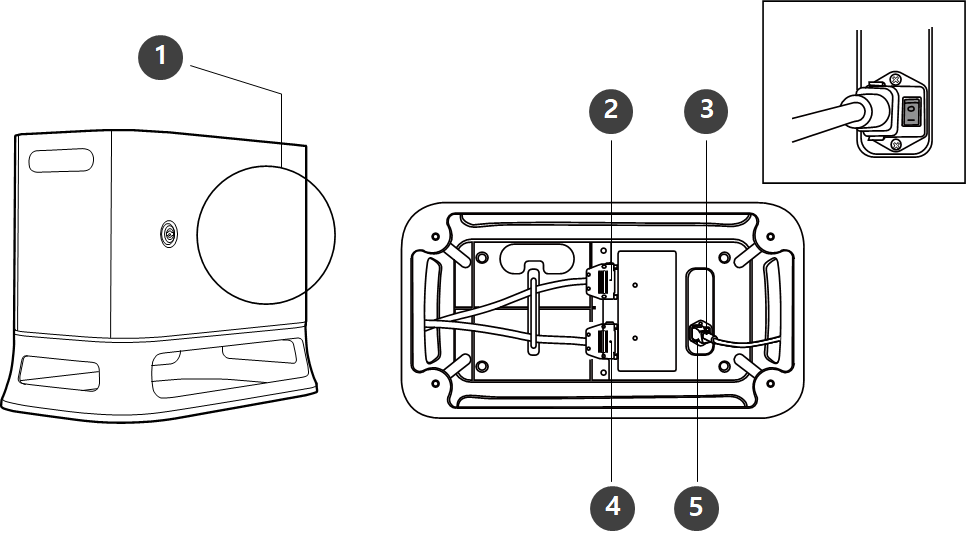
No. | Item | Description |
|---|---|---|
1 | I/O connection terminal (internal) | Used to connect the controller or peripherals. |
2 | Teach pendant cable connection terminal | Used to connect the teach pendant cable with the controller. |
3 | Power switch | Used to turn ON/OFF the main power of the controller. |
4 | Manipulator cable connection terminal | Used to connect the manipulator cable to the controller. |
5 | Power connection terminal | Used to connect the controller power supply. |
Note
If you selected an optional controller, check the instructions in the appendix to connect cables.
Teach pendant
A Series
The teach pendant is not a standard item but an optional item, so it must be purchased separately
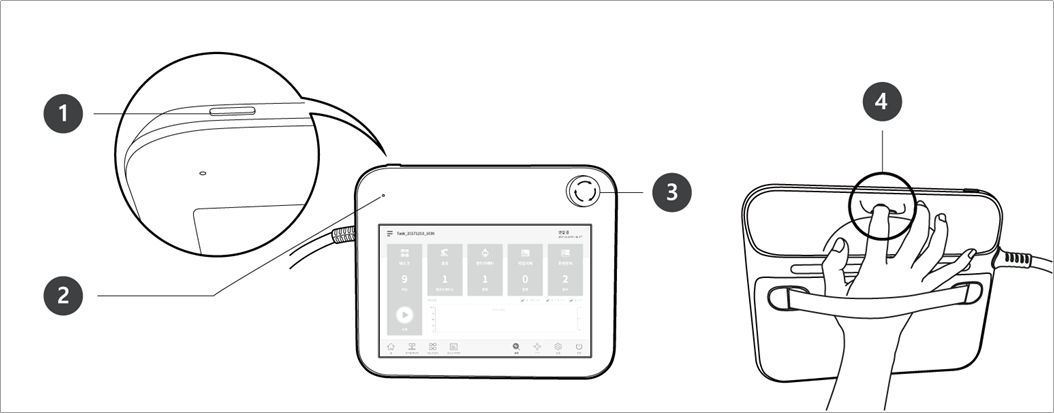
No. | Item | Description |
|---|---|---|
1 | Power button | Used to turn ON/OFF the main power of the teach pendant. For detailed product features, please refer System Power On/Off |
2 | Power LED | Turns ON when power is supplied. |
3 | Emergency stop button | Press the button to stop robot operation in case of an emergency. |
4 | Hand guiding button | Press and hold the button to move the robot freely into a desired pose. |
Note
If you need to protect and hold the Teach Pendant during work, you can use it more safely and easily with a soft cover supplied by Doosan Robotics.