
Execute based on Joint
To adjust the angle based on the robot joint, follow these steps:
Select the Joint tab on the Joint screen.
Select the axis (J1-J6) to adjust the angle. (J4 is disabled for P series models)

Press and hold the Direction Button (
 ,
,  ) to adjust the angle of the corresponding axis.
) to adjust the angle of the corresponding axis.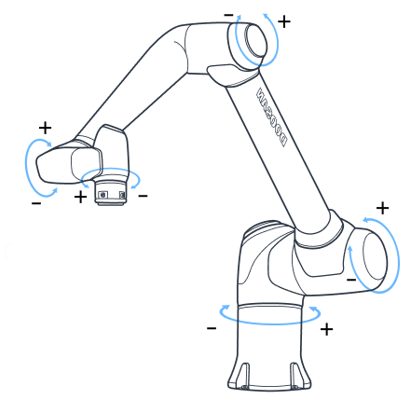
Note
Safety area does not apply in virtual mode.