
Cockpit Button (five buttons)
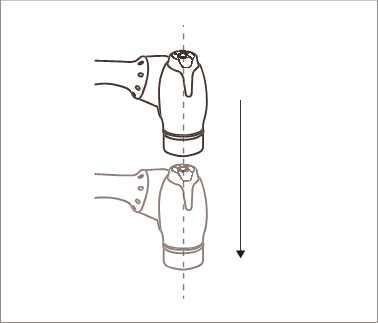
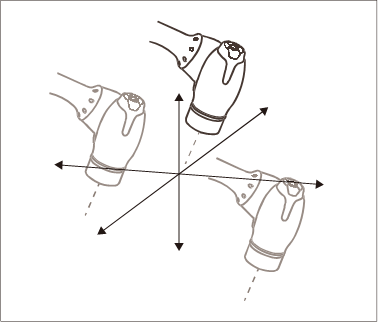
The user can change the robot’s pose while holding down the Hand-guiding button or custom button on the cockpit.
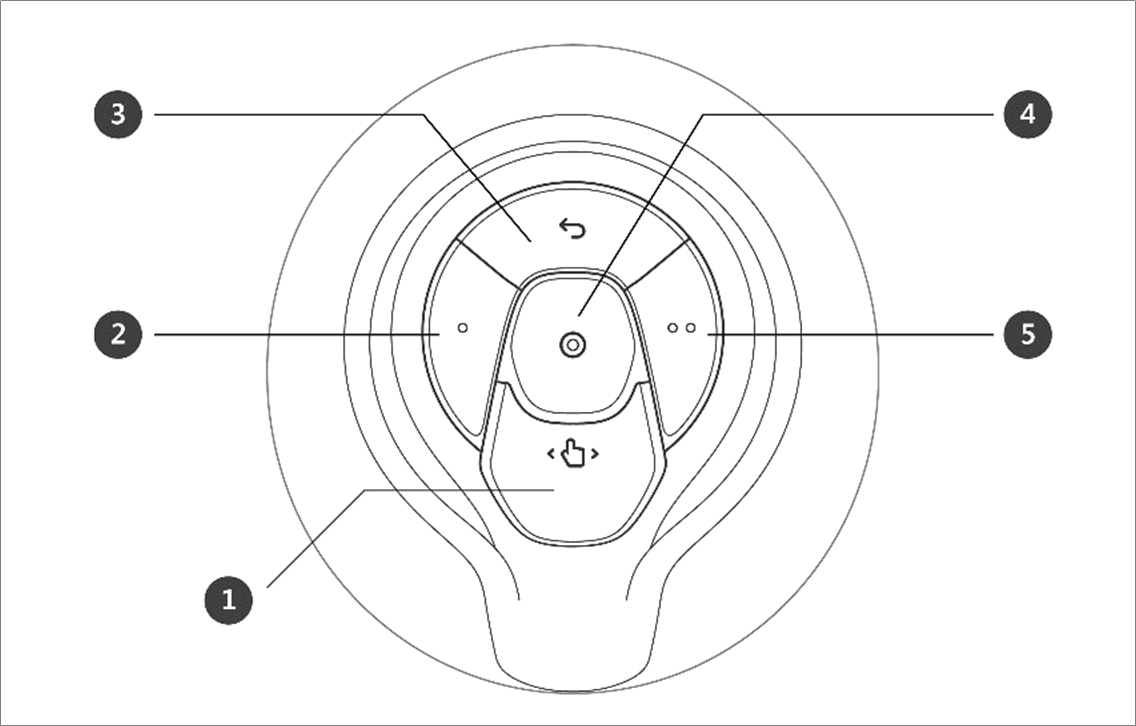
No. | Item | Description |
|---|---|---|
1 | Hand-Guiding Button | This button can be used to adjust or change the robot’s pose. |
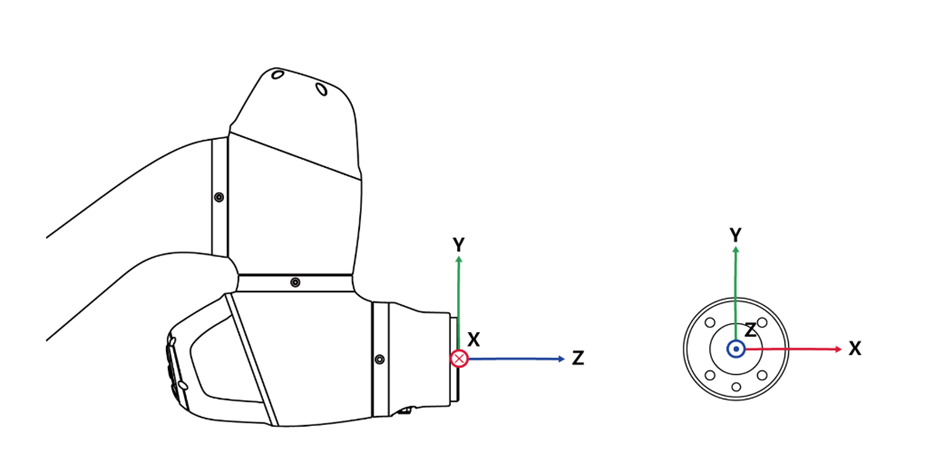
2, 5 | User Setting Button (Constrained Motion) | This button can modify the robot’s pose by entering a pose according to a lock condition corresponding to a mode.
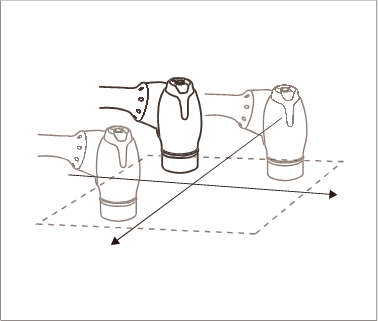
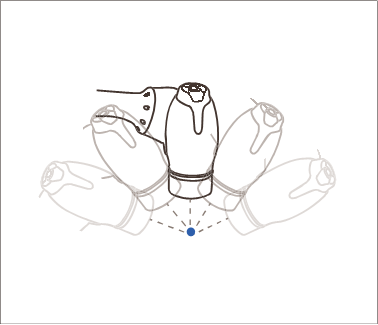
 For more information about the settings, refer to Cockpit Setting. |
3 | Cancel Button | Deletes the most recently saved pose. |
4 | Save Pose Button | Saves the current robot pose. For more information, refer to Skill Command Work Point Setting with Cockpit Buttons. |
Caution
A Series models without FTS (A0509, A0912) cannot use User Setting Button(Constrained Motion).
A Series models with FTS (A0509S, A0912S) are capable of using User Setting Button(Constrained Motion).
Fixed motion relies on the FTS attached to the tip of the robot; therefore, it is essential to attach the tool and for the robot to grip it as it moves. Moving the robot while holding the body may not trigger a reaction from the robot.
For details on the functional limits of each robot series, please refer to Functional Limits of each Robot Series.