Utilize Step Run
The teach pendant offers the Step Run function, which allows users to execute a task program from a specified command step within Task Builder/Writer.
This function can be utilized with debugging function for effective program creation.
This description explains the Step Run function and its usage based on Task Builder, but the same procedure can be used in Task Writer.
Note
In order to execute the task using step run function, the robot must be in Servo On state. Press the Status > Servo On button to set the robot to Servo On.
Step Run feature is not available for these following commands:
GlobalVariables
Custom Code above Mainsub
Break
Exit
Continue
Segments of Move SX, Move SJ, Move B
Child commands within Vision / Conveyor / Watch Smart Pendant
Thread and the child commands within the Thread
Custom Code using Script file
The usage scenario is as follows:
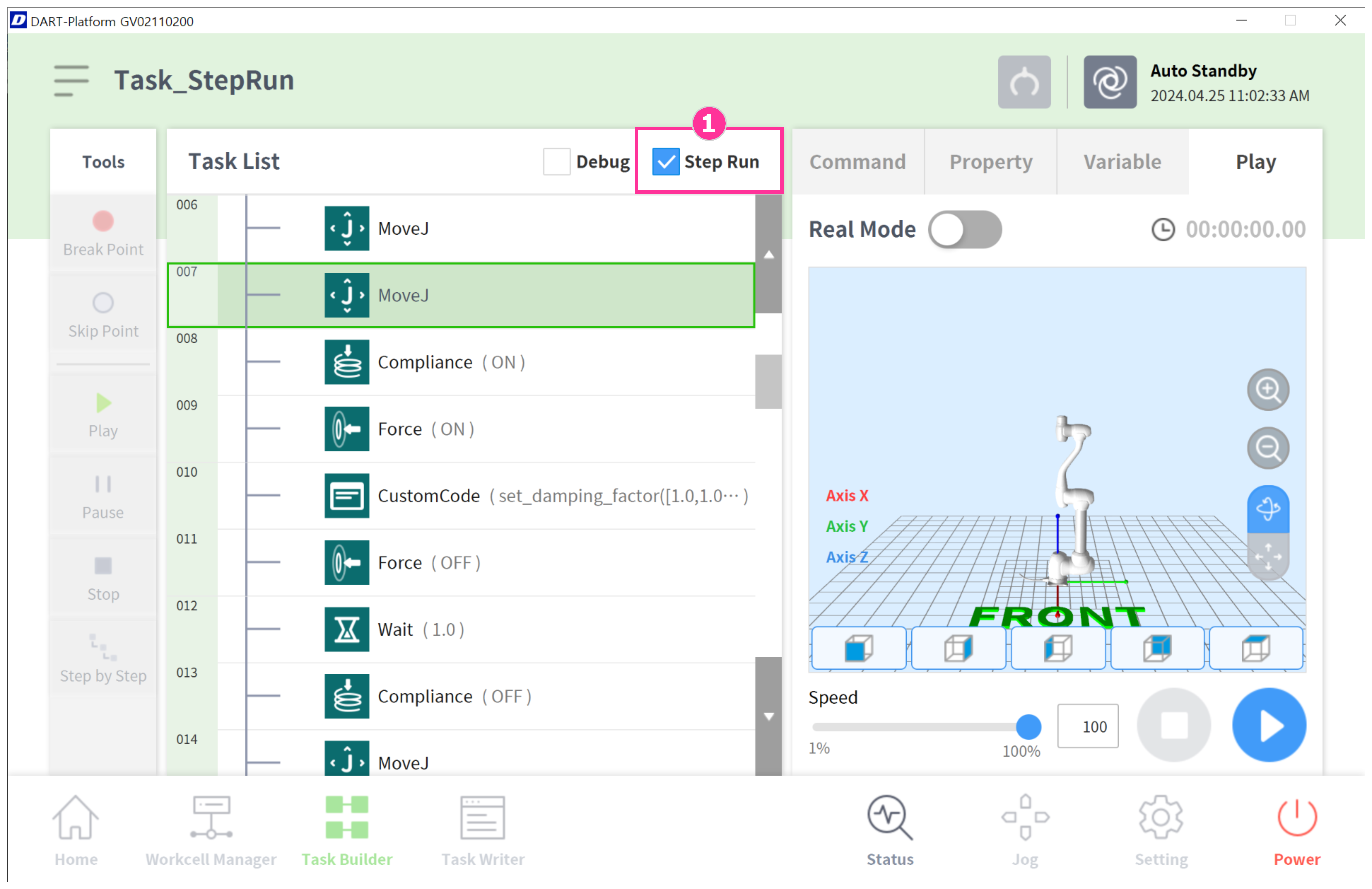
Enter the Play tab within Task Builder/Writer.
Select the Step Run checkbox. (1)
Select the program execution mode. (Real mode/Virtual mode)
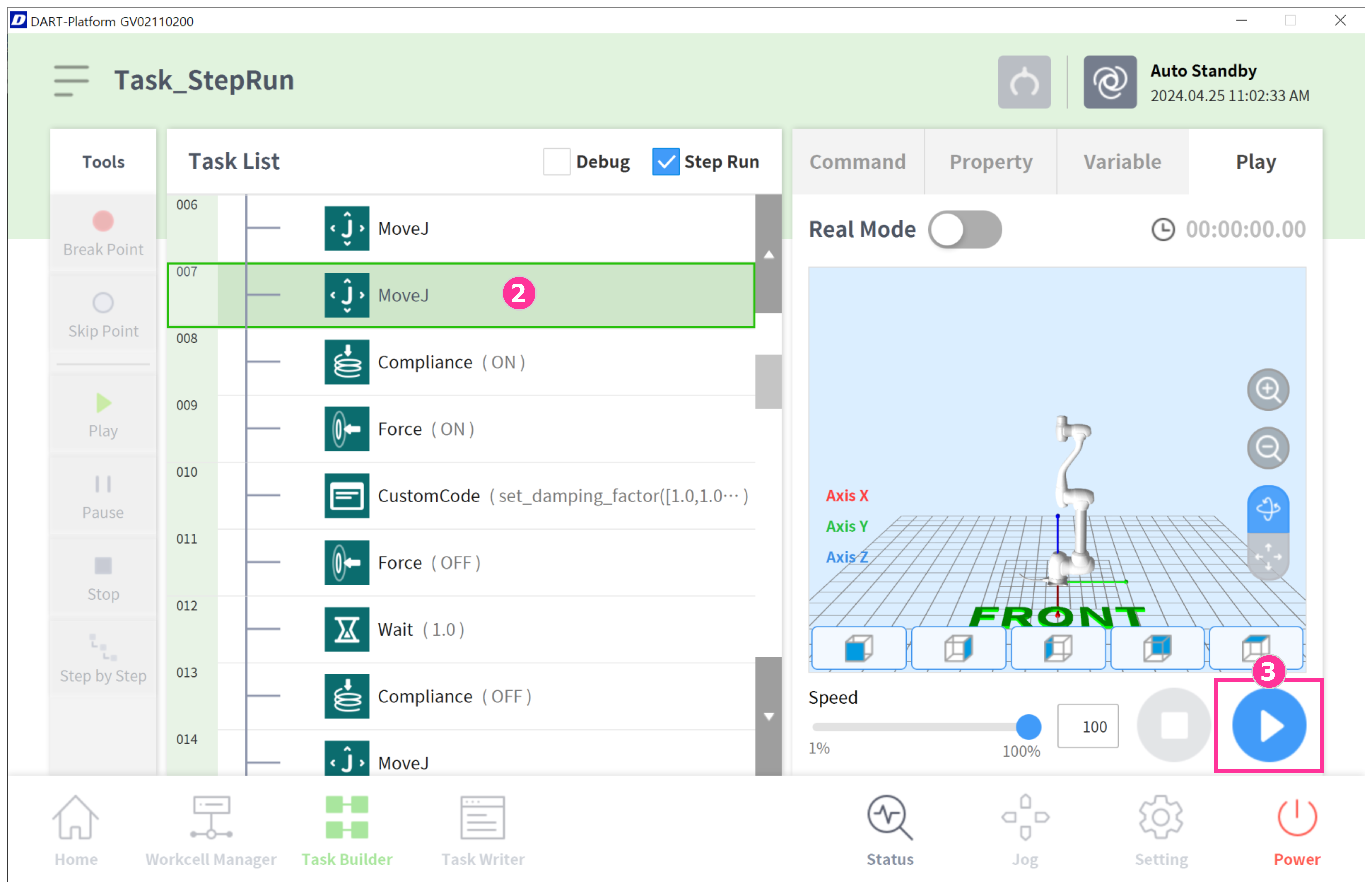
Select the command to start from in the Task List (2), then press the Play button.(3)
In the Step Run Mode popup, select the (4) button to start from the specified command.
You can also run the program from the beginning by pressing the (5) button.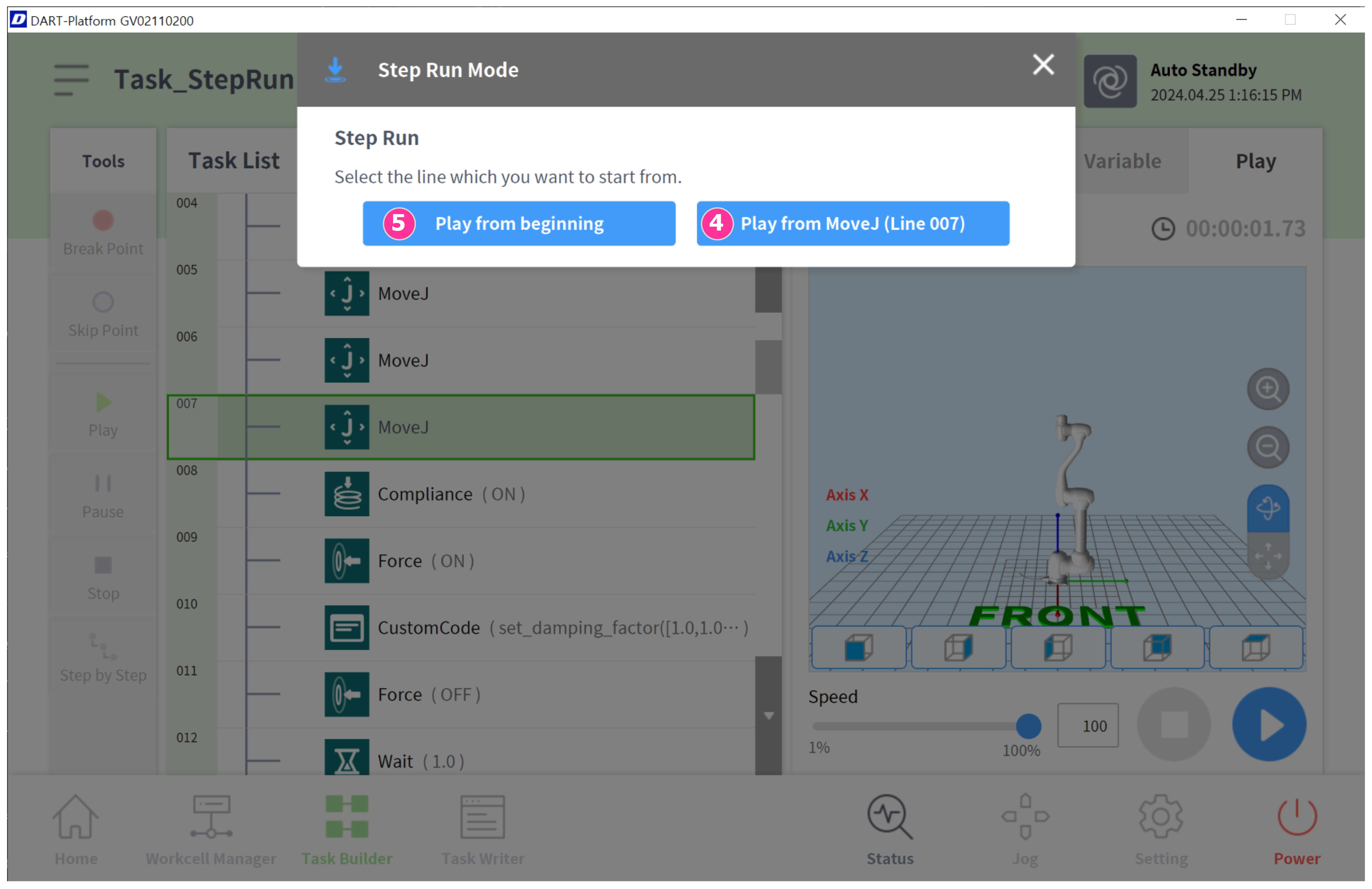
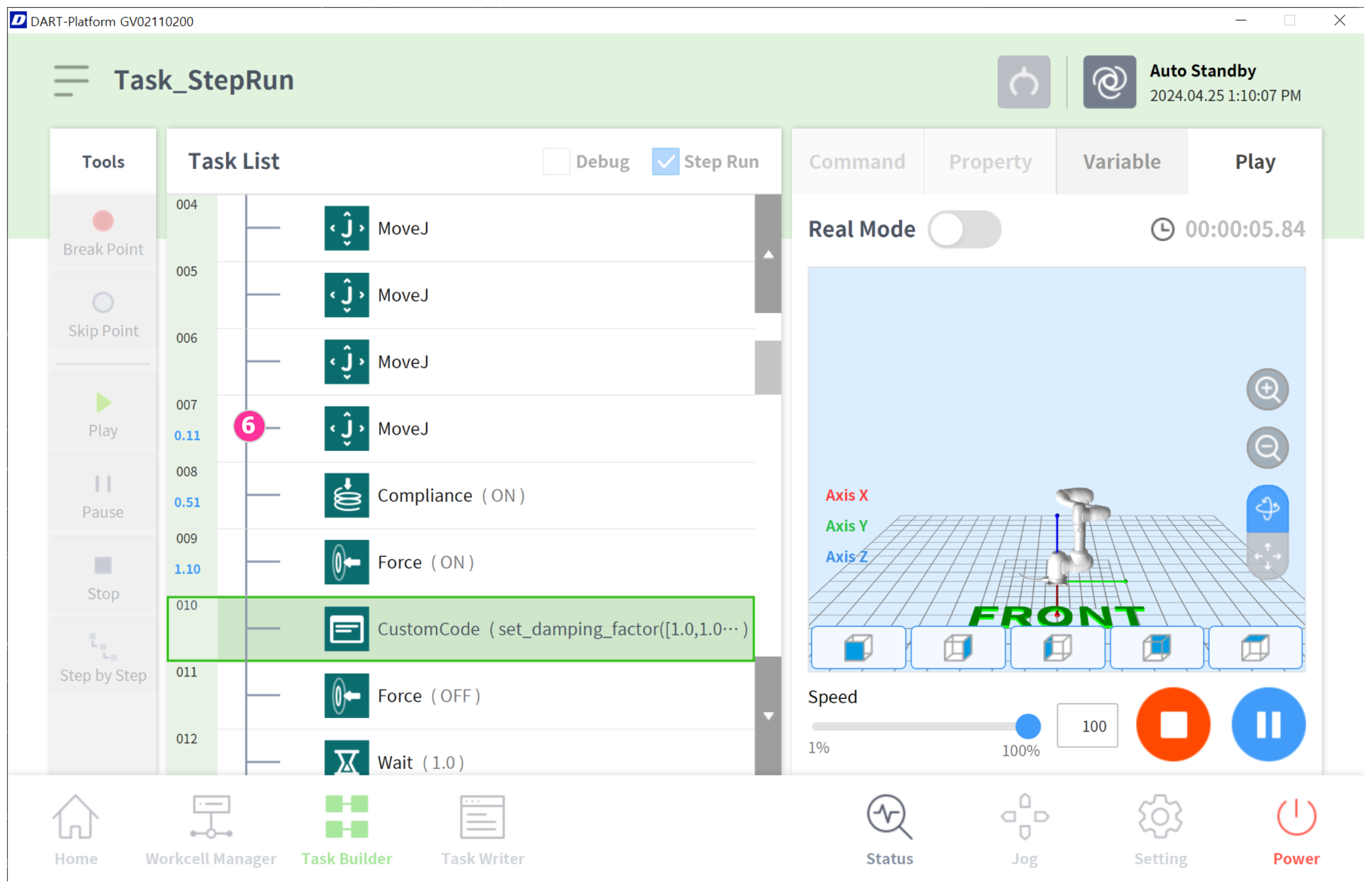
Check the program run after selecting to start from specified line.(6)