System Booting
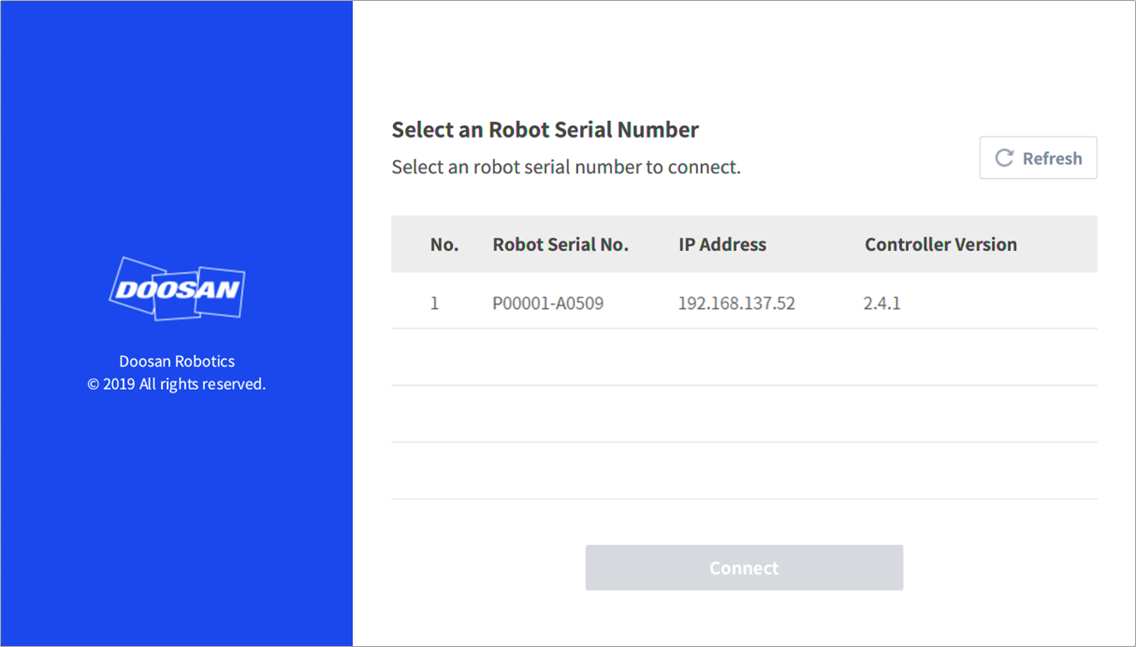
After the system is powered on, the system boots up. When booting is complete, the system application is displayed on the teach pendant. For more information about the system application, refer to “ Program screen configuration”.
In case of DART-Platform (for Windows),
- Run the DART-platform installed on the desktop or laptop.
- Wait about 5 minutes for the robot controller to finish booting.
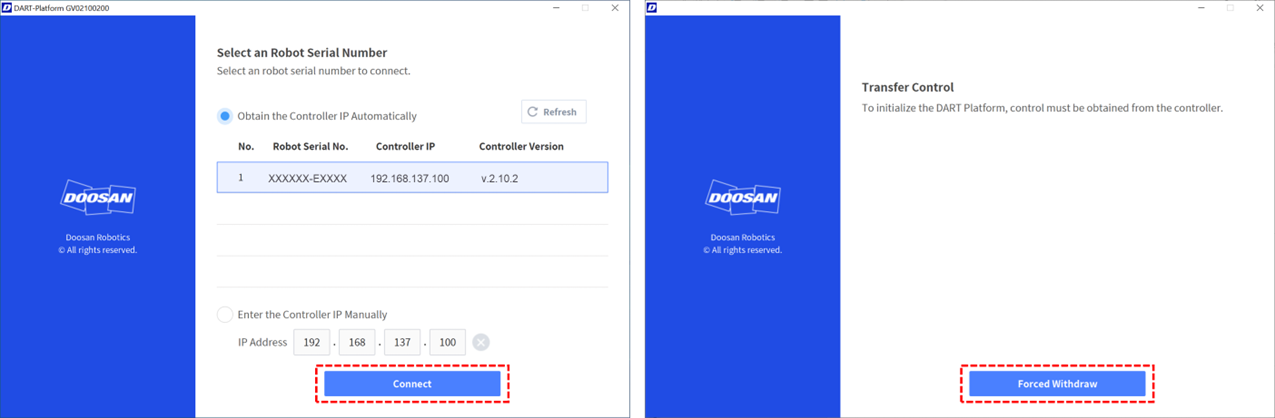
- When the IP is searched, check the serial number of the robot connected to the network.
- Select the robot you want to connect and click the 'Connect' button.
- Press the Force Recall button to transfer the control.
Note
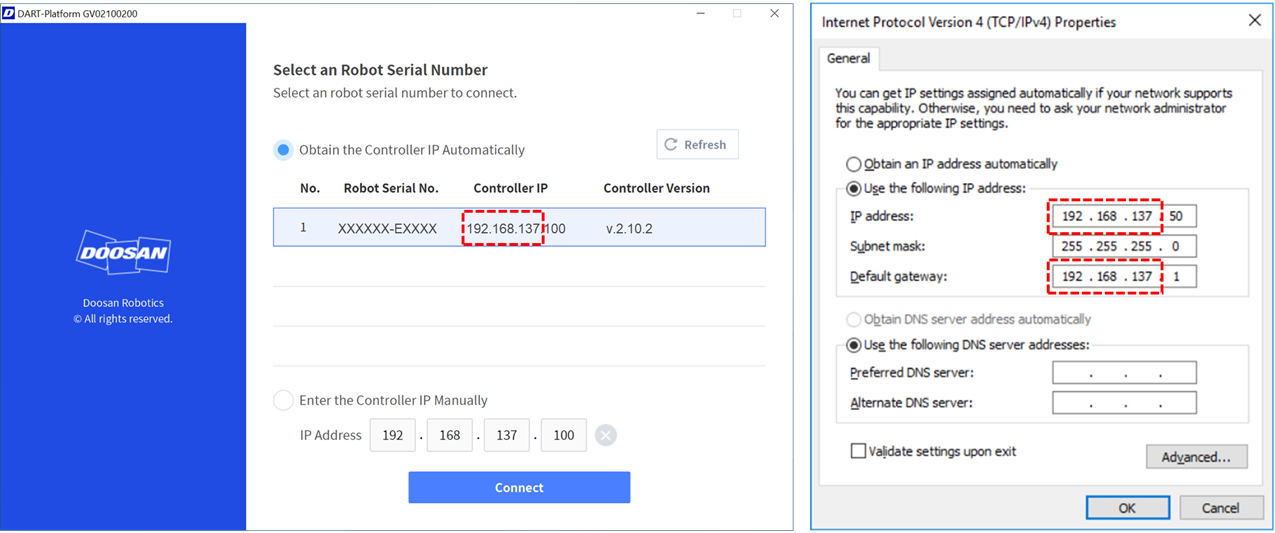
- If there is no connection between the controller and DART-Platform, change the C class band of IP address and default gateway of the desktop or laptop with DART-Platform installed to the C class band of the controllers IP address, and retry.
- If the IP is not searched, select 'Enter the Controller IP Manually' and proceed with the connection. The controller's default IP address is set to 192.168.137.100.
- If the Forced Withdraw of the control continues to fail, check the following:
- Close the program and restart.
- Ensure the Emergency Stop Button(s) is(are) not pressed.
- If one or more pairs of digital inputs of the controller are designated to the Emergency Stop / Remote Emergency Stop / STO signal (Active Low) in Safety I/O setting, ensure all designated signal(s) is(are) deactivated (High).
- Check whether the controller has finished booting.
- Check the robot status. In case of Remote Control, Recovery, or Backdrive, running DART-platform may fail.
Note
- Servo On: In order to move the robot’s pose, the robot must be in servo on status where power is supplied to joints of the robot and the robot is on standby. For more information about servo on, refer to “ Servo On”
- Date and Time Setting: The date and time displayed on the teach pendant and the log message saved on the robot follow the date and time setting of the system, so the date and time must be configured at initial boot up. For information regarding how to configure the date and time, refer to “ Date and Time Setting ”.
- Using the DART Platform allows robot control without the teach pendant.
- The DART Platform displays a screen that shows the robot connected to the network after booting, and the process of checking the robot’s serial number and connecting to the robot take place on this screen.