
Move with World Coordinates Reference Coordinates
To move the robot based on World Coordinates, follow these steps:
Select the Move tab and select the Task tab.
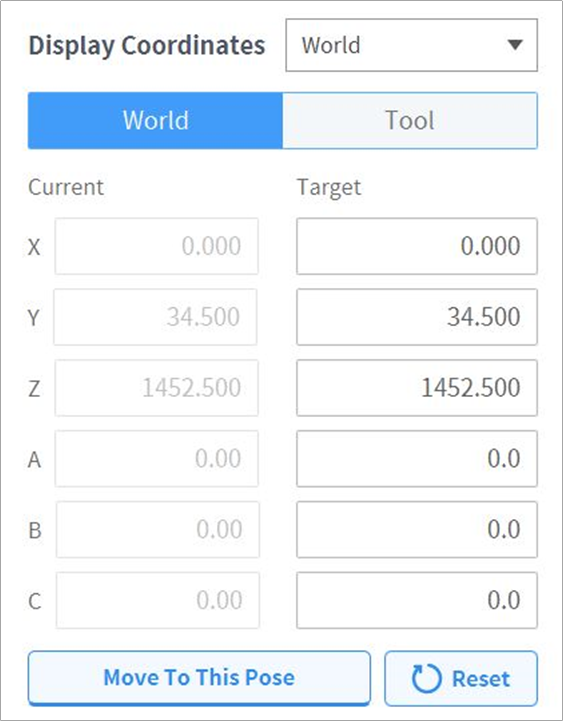
Select World as the display coordinates and select the World tab.
Configure the pose to move with reference to the World Coordinates.
Tap and hold the “Move to Corresponding Pose” button to go to the set coordinate.