
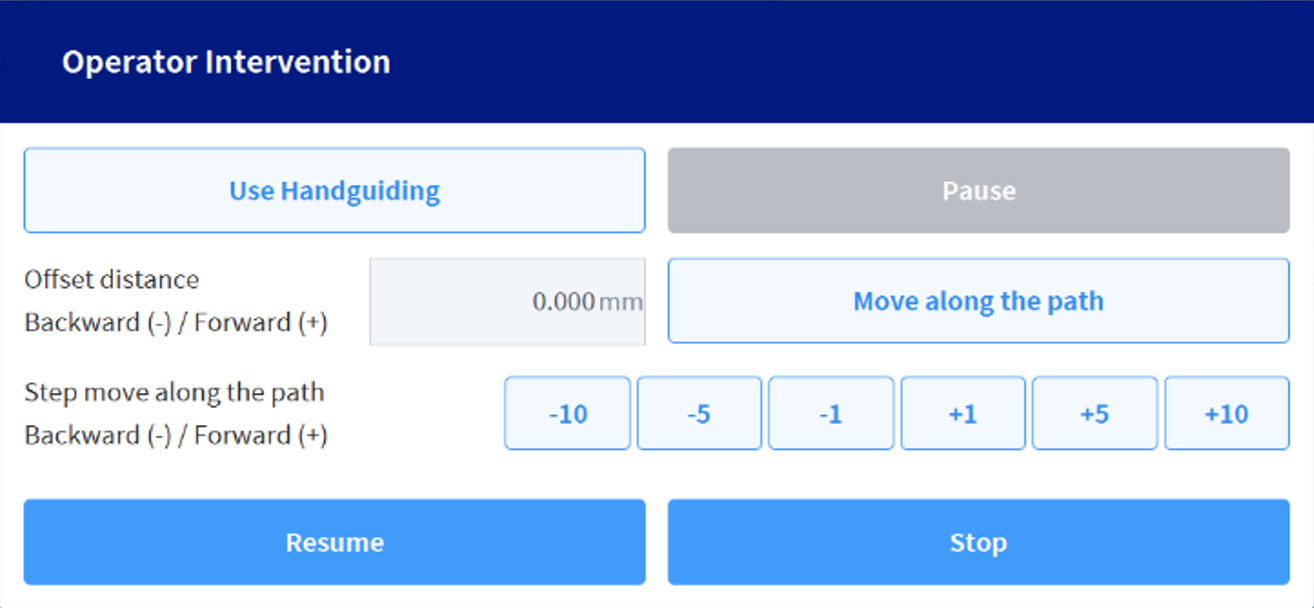
Function of Operator Intervention
If a problem occurs while the robot is operating or a user issues a command, the robot stops operating and displays a pop-up message allowing the operator to intervene and resolve the situation. After the user resolves the problem, the task continues on the program line where the problem occurred.
Note
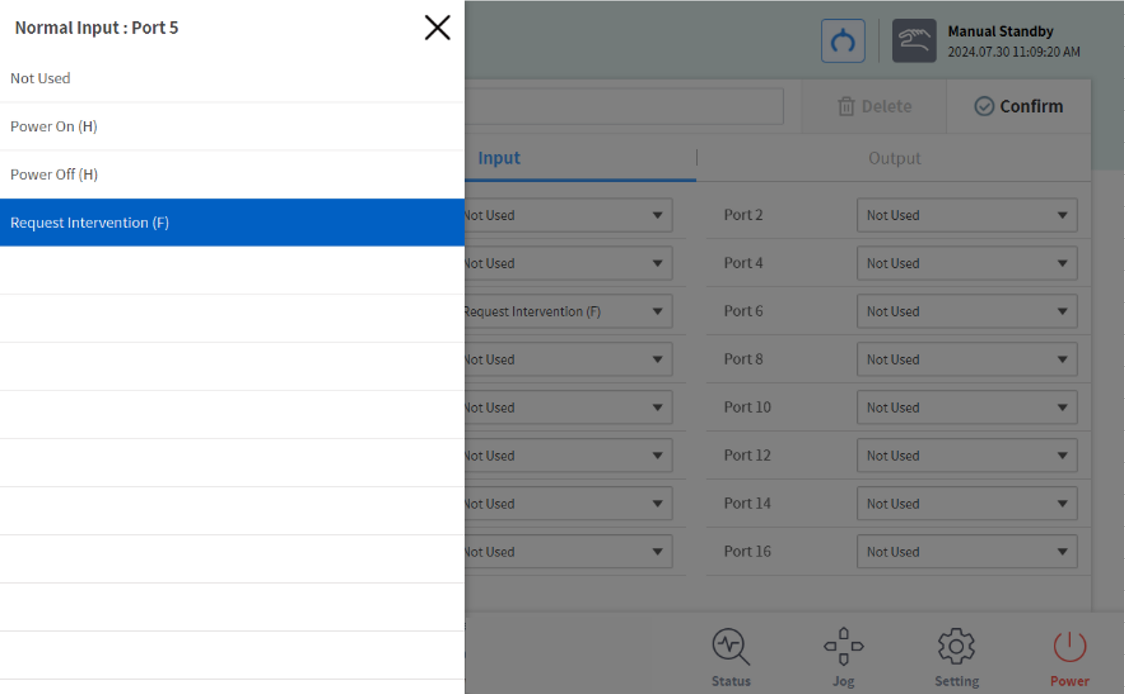
To use the worker intervention feature, you must complete one of the settings below.
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(For detailed settings, refer to the Welding Technical Note.)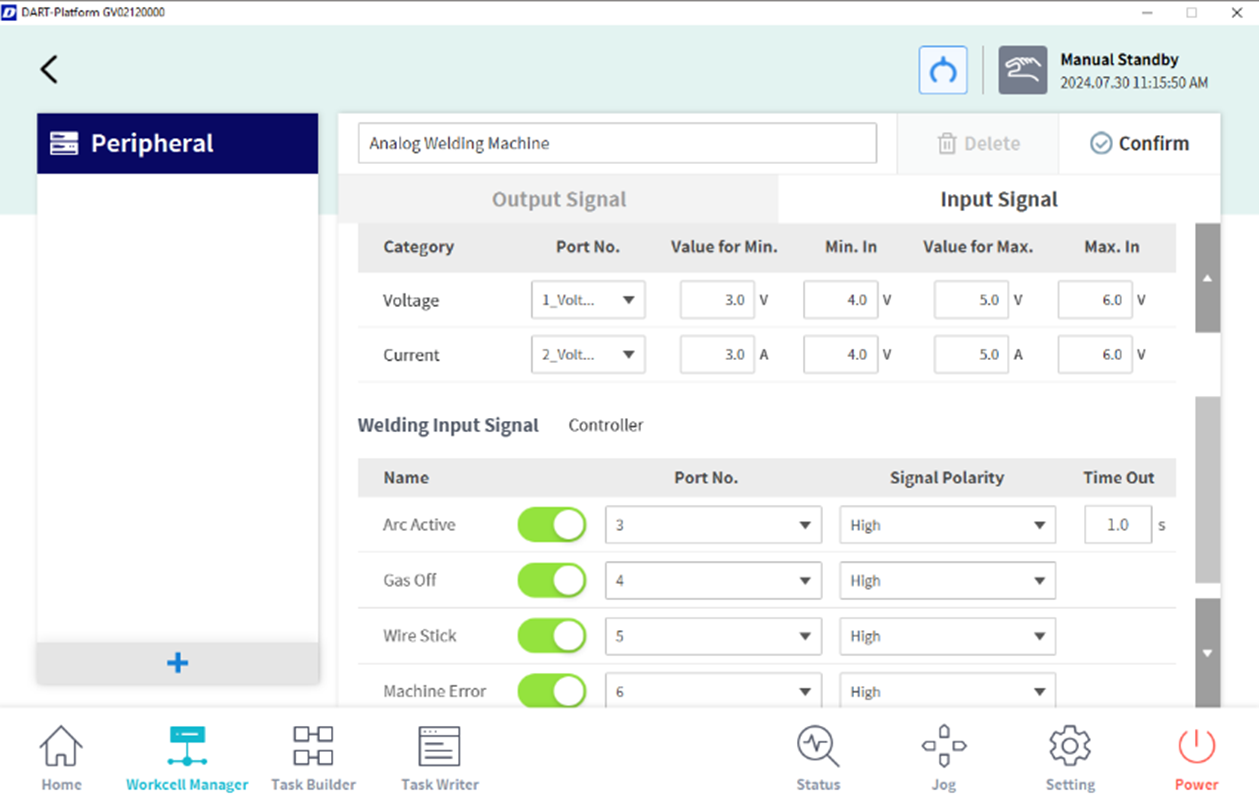
The “Move along the path button” and the “Step Move button (-10,-5,-1,+1,+5,+10)” perform the same action. However, the former moves forward or backward from the reference position by a manually entered Offset, while the latter targets a point forward or backward by a preset Step Offset. After completing an action using the above buttons, pressing an additional button will move the current position by the Offset.
The “Use Handguiding button” is activated only when a Collaborative Zone is set, and the robot state changes to the Handguiding state, which allows direct teaching within the Zone. After that, you can activate direct teaching by pressing the button on the back of the cockpit or the Teaching pendant.
In handguiding mode, the “Use Handguiding button” changes to the “End Handguiding button”.
When you press the “End Handguiding button”, the handguiding state ends. At this time, for safety reasons, the current robot position, angle, and the values of the stop point (the time when the first pop-up occurs) are compared to generate a pop-up. If a pop-up with the following contents occurs, you must teach again directly to correct the robot’s position and posture and try again.
If the straight-line distance between the current TCP position and the TCP at the stop position differs by more than 20 cm
If the difference between the current Joint Angle and the Joint Angle at the stop point differs by more than 1~3 axes (10 degrees) / 4~5 axes (30 degrees) / 6 axes (60 degrees)
This feature is supported only during MoveL / MoveC / MoveB operations.
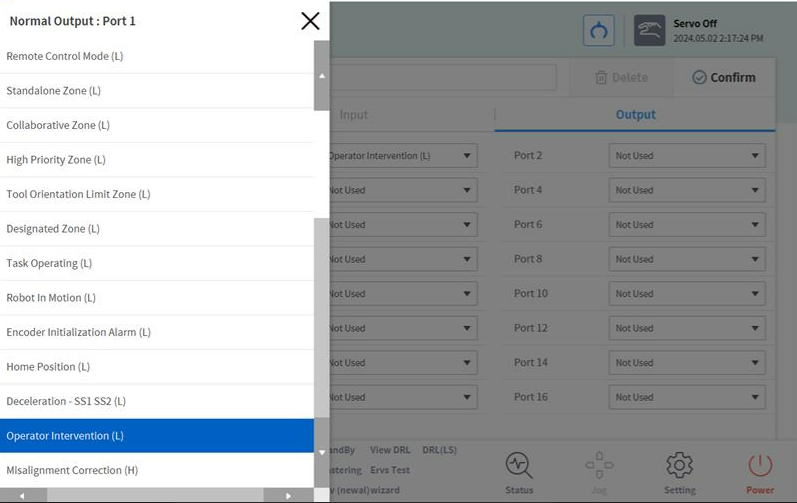
You can use the Normal Output function to signal that a popup has occurred. The signal will remain active while the popup is occurring, and will be deactivated when the popup ends.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
Here is the usage scenario:
Receive a digital input signal from the user or a connected device while the program is running.
The robot pauses and an operator intervention pop-up appears.
(If using direct teaching) Press the Use Handguiding button, then press the button on the back of the cockpit or teaching pendant to activate direct teaching. After the direct teaching operation is complete, press the End Handguiding button.
Press the Move along the path button to move the robot along the path.
After moving the robot as much as desired, press the Resume button to resume the robot's task and close the pop-up.