
Execute based on Robot Tool
To move the robot based on the robot tool, follow these steps:
Select the Task tab on the Jog screen.
Select Base or World as the display coordinates and set the Tool based on the reference point of the task coordinates.
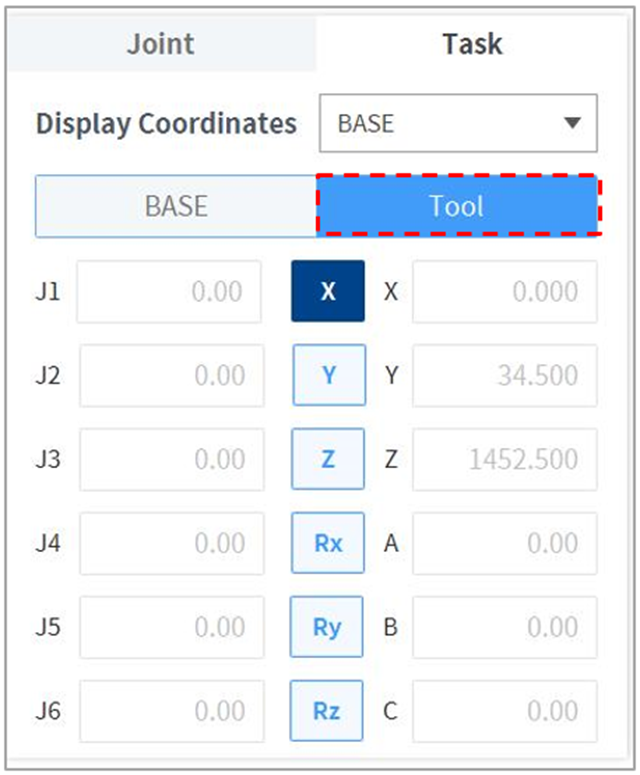
Select the Tool Coordinates to move.
Press and hold the Direction Button (
 ,
,  ) to move the corresponding axis.
) to move the corresponding axis.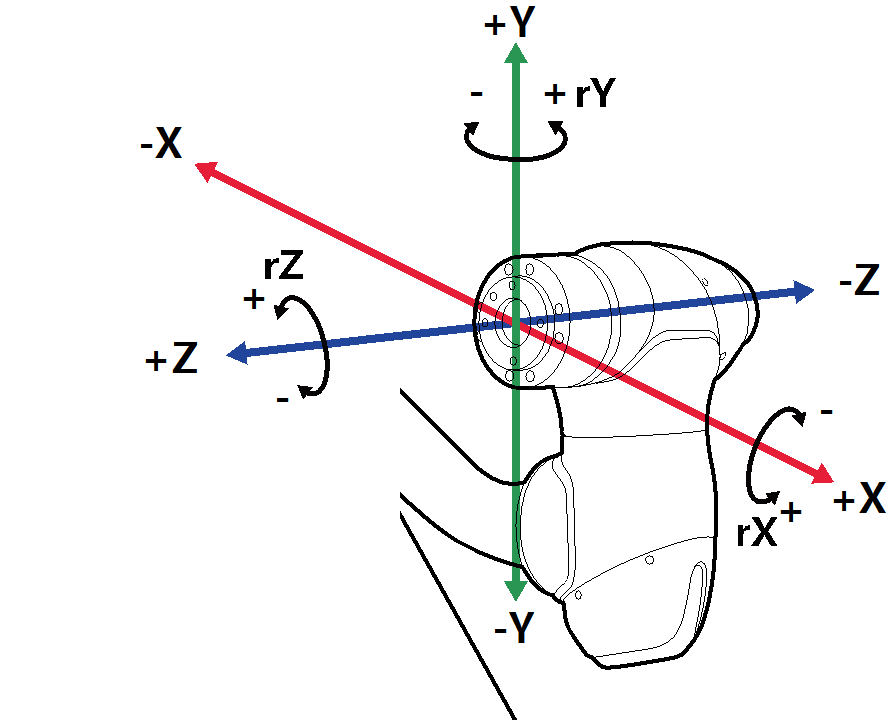
Note
Safety area does not apply in virtual mode.
Rx, Ry and Rz are executed according to TCP (tool center position).