
Recovery Module
Recovery Module: If there is an error with a continuing safety violation or if a robot needs to be packed for transportation, the user can use the Safety Recovery Mode to configure the position and angle of the robot.

To access the Recovery module, tap the Recovery button located at the bottom.
Software Recovery: In Servo Off status, if a safety violation error situation caused by position-related safety violations, such as the robot exiting the operation area or violating prohibited areas, occurs or force is continuously applied when the robot is stopped due to colliding with a fixed object, Servo On or Jog cannot be set even when attempting to reset the robot to a normal state using the Jog or program. In such cases, Software Recovery mode is used to reset the robot to normal.
Packaging Mode: For packaging and transporting the robot, the robot can be set to predefined values (which go beyond the normal operation angle limit) for transporting.
If the servo is enabled when the Recovery module is launched, the following pop-up appears and the servo is automatically turned off.
Using Software Recovery Mode
Software Recovery Mode
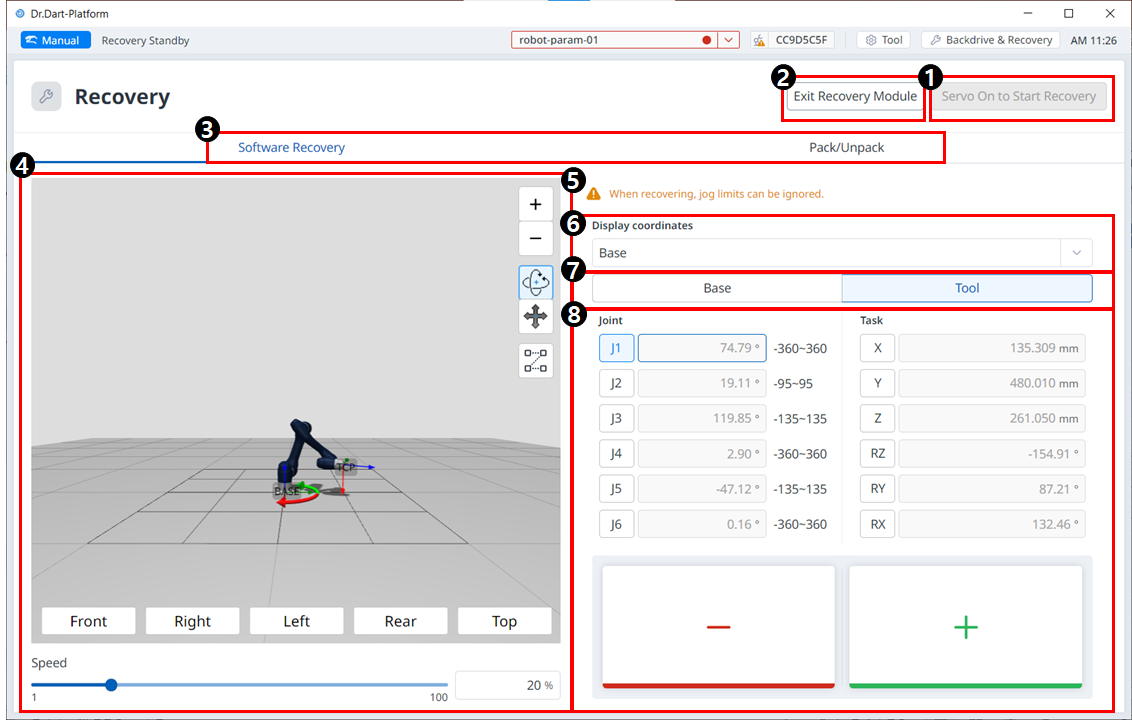
Menu
Items | Description | |
|---|---|---|
| 1 | Servo On to Start Recovery | This is a button to enable the servo before entering Recovery mode. |
| 2 | Exit Recovery | This button allows you to exit the Recovery module. |
| 3 | Header | This section allows you to select either Software Recovery mode or pack/unpack mode. |
| 4 | 3D Simulation | This area allows you to preview a 3D simulation of the set values. |
| 5 | Warning Message | This explains the precautions. |
| 6 | Display Coordinates | This is where you can set the coordinate based on Base or World. |
| 7 | Base/Tool Button | This is where you can set the value based on Base or Tool. |
| 8 | Joint/Task | This section allows you to enter the desired values to make the robot move. |
To use the software recovery mode, follow these steps:
Tap the Recovery menu in the header pane. The Software Recovery screen appears automatically in the Recovery window.
Tap each joint button on the right side of the Software Recovery screen, and use
 ,
,  buttons to set the position. Or press buttons of the cockpit to adjust the joint angle by direct teaching.
buttons to set the position. Or press buttons of the cockpit to adjust the joint angle by direct teaching.For definitions of the buttons in the cockpit, refer to Cockpit
Changes made to the setting are reflected on the simulation window on the left in real time.
When the setting is complete, tap the X button on the top left to close the window.
Caution
Software repair mode is not available when the joint angle limit is exceeded by 3 degrees.
Using Pack/Unpack
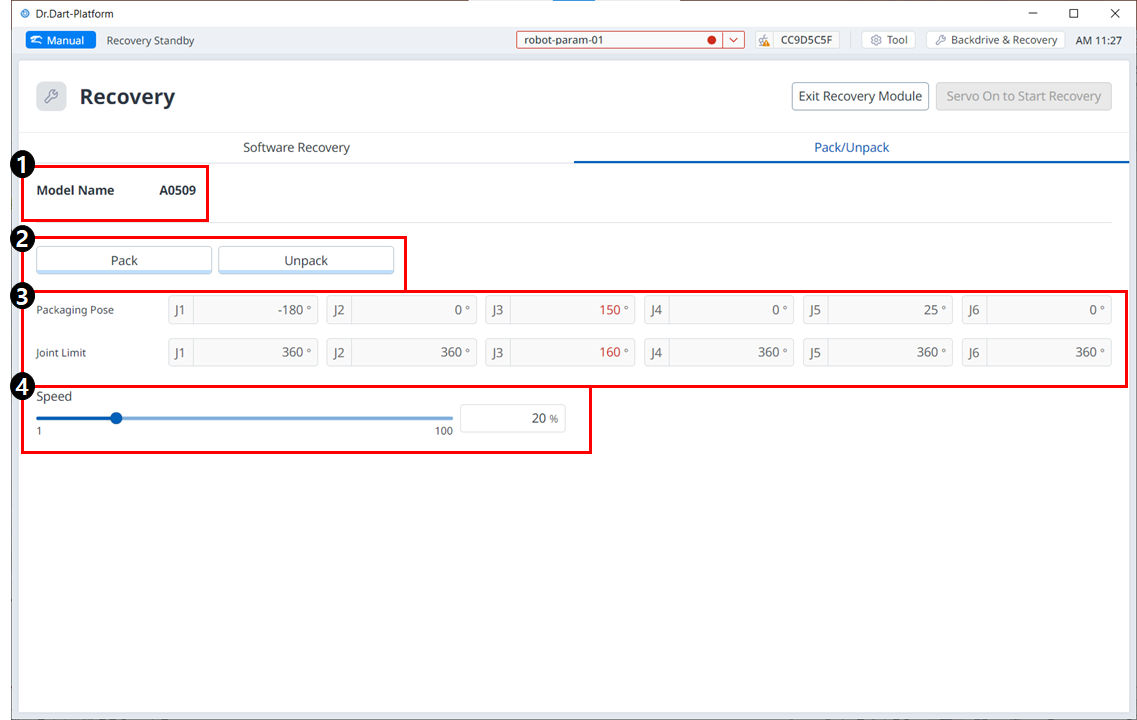
Menu
Items | Description | |
|---|---|---|
| 1 | Model Name | The name of the connected robot model appears. |
| 2 | Pack/Unpack | Either Pack or Unpack can be selected. |
| 3 | Packaging Pose/joint Limit | The pose and joint limit values appear. |
| 4 | Speed Ratio | The speed of the pack or unpack mode can be adjusted via a slider or input. |
To configure the packaging mode, follow these steps:
Tap the Recovery menu in the header pane.

Select the Packaging Mode tab.

Tap the Servo On to Start Recovery button to enable packaging mode.

The robot automatically moves to the set packaging pose.
The Pack button allows you to put the robot in the Pack position and the Unpack button allows you to put the robot in the Default Home Position.