
Overview of Servo On
Servo On refers to a standby state in which the robot arm can be driven by powering the joint. Servo off when an emergency stop button is pressed or a safety restriction is violated. In the servo off state, the joint is powered off and the robot arm cannot be driven and the task editor, jog plus associated with the robot arm drive is disabled in the main menu.
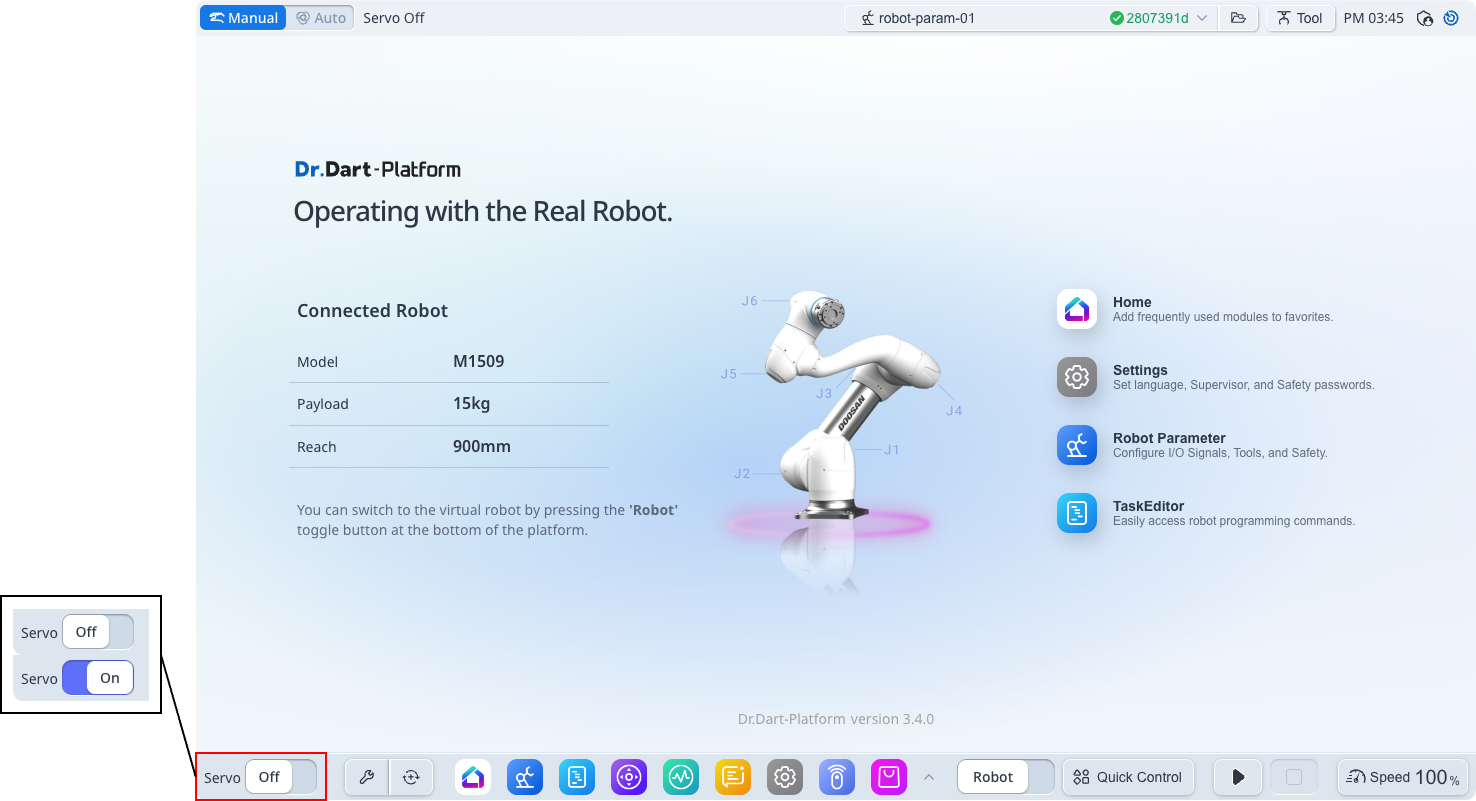
To switch from servo off to servo on, tap the Servo button on the left-hand side of the main menu at the bottom.