
Jog Panel
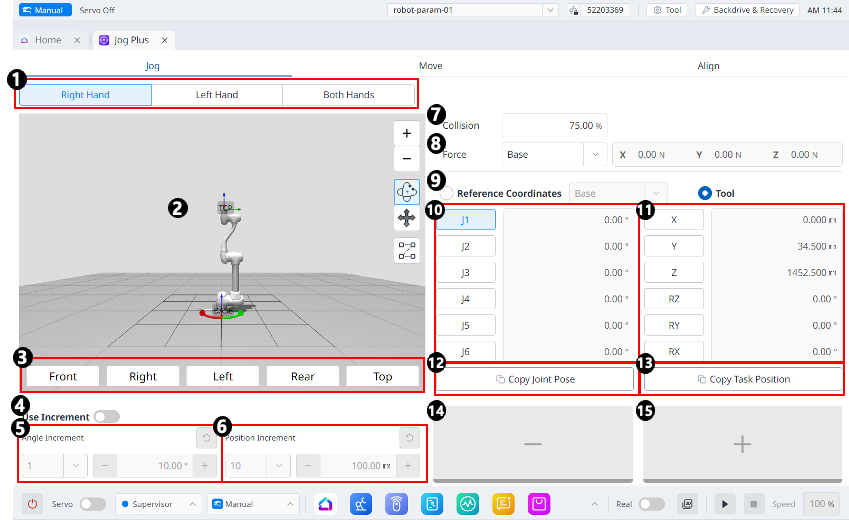
Menu
Items | Description | |
|---|---|---|
| 1 | Select panel type | You can choose the location of the move button. |
| 2 | 3D Simulation | This is the 3D viewer, where you can see how the robot looks. |
| 3 | Simulator Alignment | You can utilize this section to steer the simulator. |
| 4 | Use Increment | This button allows you to enable angle or position increments. |
| 5 | Angle Increment | This section is where the angle increment on the selected axis is set. |
| 6 | Position Increment | This section is where the position increment on the selected axis is set. |
| 7 | Collision | This field is where you set the Robot Collision. |
| 8 | Force Monitoring | This section is where you set the forces in the X, Y, and Z axes based on Base, Tool, World, Reference and among others. |
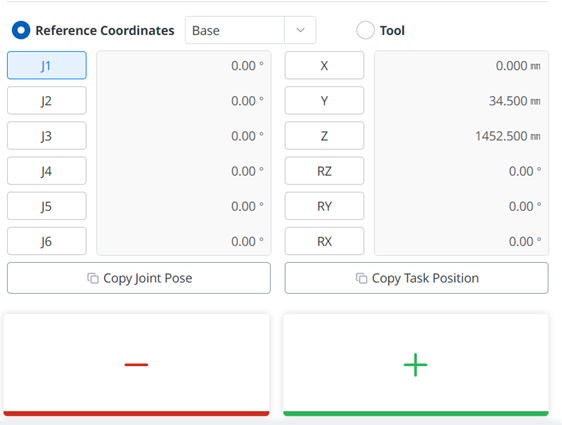
| 9 | Select reference coordinate system | Select the reference coordinate system to be used for the task coordinates in Figure 11. You can choose Base, World, or User coordinates. |
| 10 | Joint panel | You can select the joint axis to jog. |
| 11 | Task panel | You can select the task axis to jog. |
| 12 | Copy Pose J button | This button allows you to copy Pose J. |
| 13 | Copy Pose X button | This button allows you to copy Pose X. |
| 14 | Move - Button | You can have the robot move in the - direction based on each axis. At this time, you can figure out the direction of the - and + on the 3D simulation on the left-hand side. |
| 15 | Move + Button | You can have the robot move in the + direction based on each axis. At this time, you can figure out the direction of the - and + on the 3D simulation on the left-hand side. |
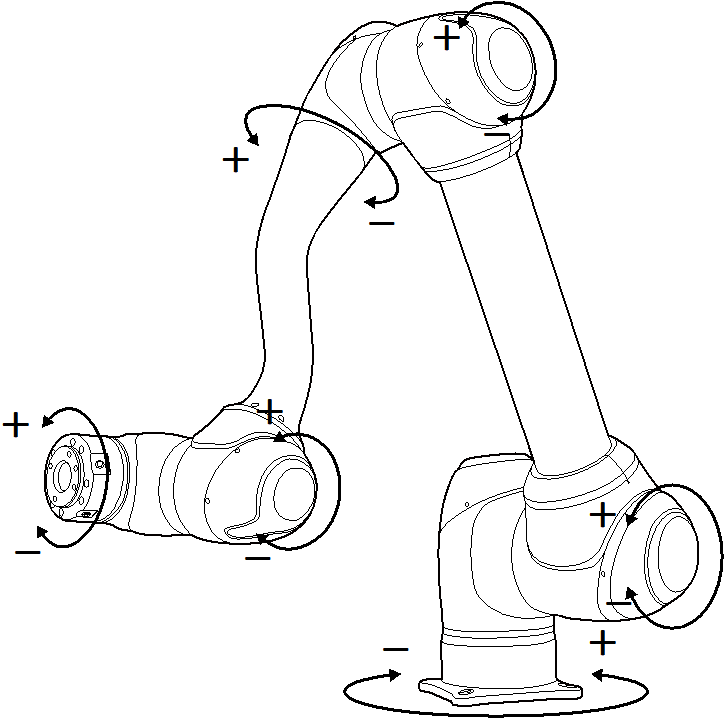
Execute based on Robot Joint
To adjust the angle based on the robot joint, follow these steps:
Select the axis (J1-J6) to adjust the angle on the Joint Panel.
Press and hold the Direction Buttons (
 ,
,  ) to adjust the angle of the corresponding axis.
) to adjust the angle of the corresponding axis.
Executing based on Robot Base

To move the robot based on its base coordinates, follow these steps:
Select the Base as a reference coordinate system.
In the task panel, select the axis (X~RX) for which you want to adjust the angle.
Press and hold the Direction button (+,-) to move the corresponding axis.
Executing based on World Coordinates

To move the robot based on World Coordinates, follow these steps:
Select the World as a reference coordinate system.
In the task panel, select the axis (X~RX) for which you want to adjust the angle.
Press and hold the Direction button (+,-) to move the corresponding axis.
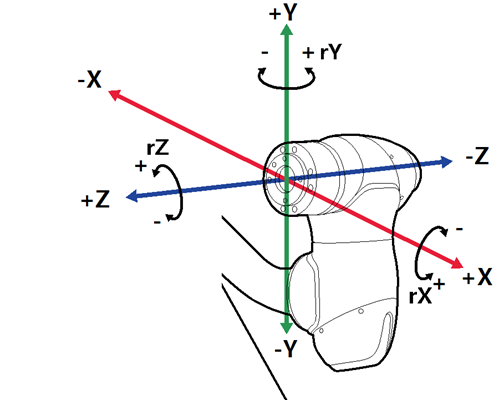
Executing based on Robot Tool

To move the robot based on the robot tool, follow these steps:
Select the tool as a reference coordinate system.
In the task panel, select the axis (X~RX) for which you want to adjust the angle.
Press and hold the Direction button (+,-) to move the corresponding axis.
Note
Safety area does not apply in virtual mode.
Rx, Ry and Rz are executed according to TCP (tool center position).