
MoveLine.srv
Features
The robot moves along the straight line to the target position (pos) within the task space.
Parameters
| Parameter Name | Data Type | Default Value | Description |
|---|---|---|---|
pos | float64[6] | - | position list |
vel | float64[2] | - | linear velocity, angular velocity |
acc | float64[2] | - | linear acceleration, angular acceleration |
time | float64 | 0.0 | Reach time [sec] * If the time is specified, values are processed based on time, ignoring vel and acc. |
radius | float64 | 0.0 | Radius for blending |
ref | int8 | 0 | MOVE_REFERENCE_BASE =0 MOVE_REFERENCE_TOOL=1 |
mode | int8 | 0 | MOVE_MODE_ABSOLUTE =0 MOVE_MODE_RELATIVE =1 MOVE_REFERENCE_WORLD=2 |
blendType | int8 | 0 | BLENDING_SPEED_TYPE_DUPLICATE =0 BLENDING_SPEED_TYPE_OVERRIDE =1 |
syncType | int8 | 0 | SYNC = 0 ASYNC = 1 |
Note
- If an argument is inputted to vel (e.g., vel=30), the input argument corresponds to the linear velocity of the motion while the angular velocity is determined proportionally to the linear velocity.
- If an argument is inputted to acc (e.g., acc=60), the input argument corresponds to the linear acceleration of the motion while the angular acceleration is determined proportionally to the linear acceleration.
- If the time is specified, values are processed based on time, ignoring vel and acc
- The MOVE_REFERENCE_WORLD argument of ref is only available in M2.40 or later versions.
Caution
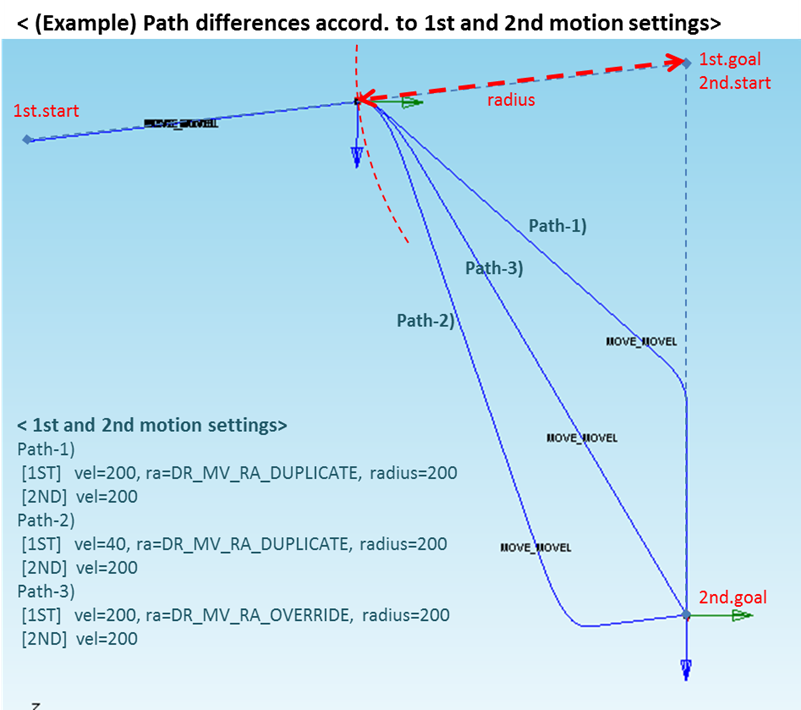
If the following motion is blended with the conditions of blendType =
BLENDING_SPEED_TYPE_DUPLICATEE and radius>0, the preceding motion can be terminated when the following motion is terminated while the remaining motion time determined by the remaining distance, velocity, and acceleration of the preceding motion is greater than the motion time of the following motion. Refer to the following image for more information.
Return
| Return Name | Data Type | Default Value | Description |
|---|---|---|---|
success | bool | - | True or False |