
Understanding Basic Principles of Skill Commands
Skill commands are based on a few operation patterns.
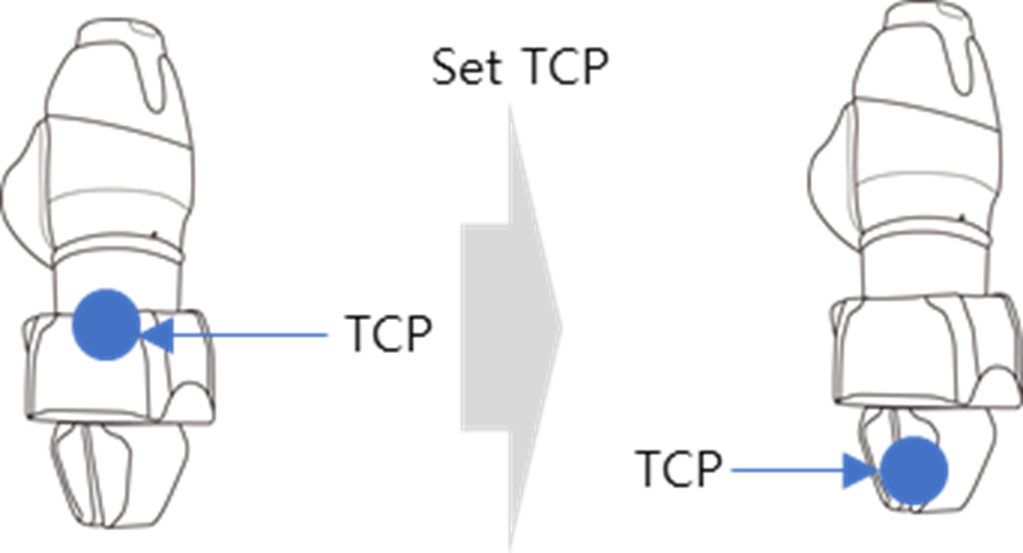
For a robot to begin operation, the weight and tool center point (TCP) of the tool equipped on the robot must be configured, and the basic operation pattern of a skill command is to have an approach pose and retract pose that are perpendicular to the reference pose.
TCP Setting
Using an End Effector skill command will automatically change the TCP offset setting. The End Effector skill command execution stage includes an offset setting suited for the TCP of the End Effector. If the TCP offset changes, the Blending Motion function, which smoothly connects the previous motion command, cannot be used.
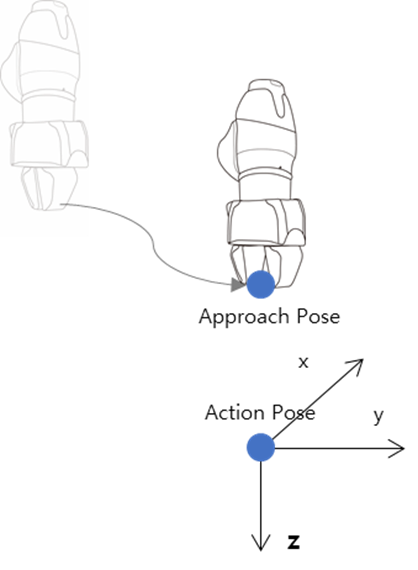
Move to Approach Pose
This is a point available to move to the Approach Pose. It is set in the Z direction from the approach pose, but a different direction can also be selected. The Approach Distance entered is automatically calculated for the Action Pose and moves to the corresponding point.
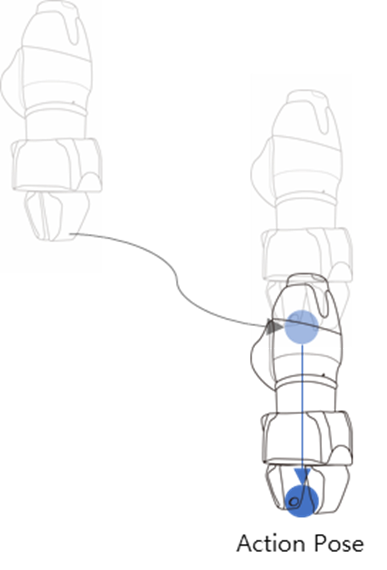
Move to Reference Pose
This is the point on the workpiece where the End Effector performs work. To set detailed coordinates other than the velocity and acceleration for the reference pose, press the button on the right side of the 
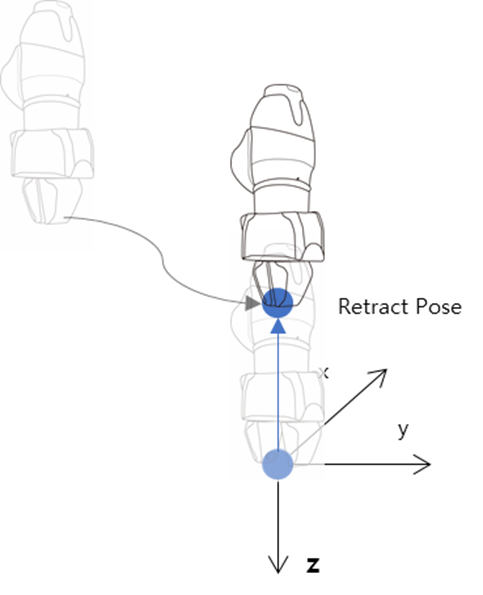
Move to Retract Pose
This is the point to pick up the workpiece and move it safely to another point. It is the –Z direction from the approach pose, but a different direction can also be selected. The Retract Distance entered is automatically calculated for the Action Pose and moves to the corresponding point.
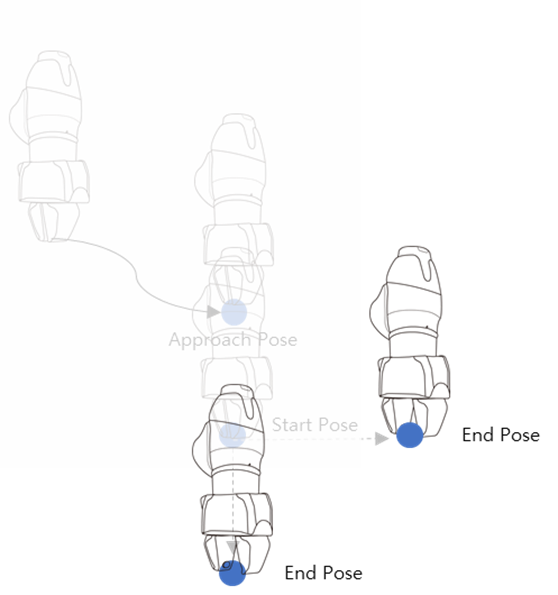
Move to Start Pose
If the End Effector execution target does not end with a single motion, there may be an intermediate point and an end point, and the Action Start Pose is the point where the work starts. (i.e. Door_OpenClose Skill – Start Pose)
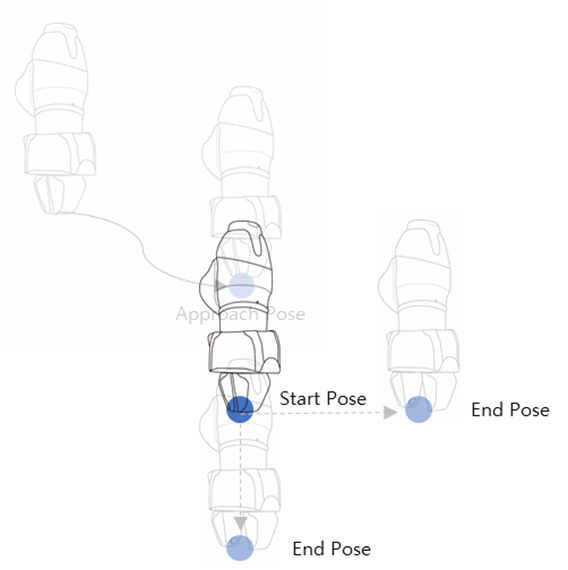
Move to End Pose
If the End Effector execution target does not end with a single motion, there may be an intermediate point and an end point, and the Action End Pose is the point where the work ends. (i.e. Door_OpenClose Skill – End Pose)
Note
When teaching the reference pose, be cautious of default skill malfunctions if detailed options are modified.
- The relative position option of the tool coordinates or other coordinates must not be used.
- Also, maintain the default values as blending radius-related options are not supported.
- The velocity/acceleration values are not applied if the time is set in task setting.